RESEARCHES
Smart Vision & Robotic Sensing

Professor, Robotics Laboratory
Smart Innovation Program, Graduate School of Advanced Science and Engineering
Hiroshima University
Smart Innovation Program, Graduate School of Advanced Science and Engineering
Hiroshima University
Idaku ISHII
- >> Research Contents
- In order to establish high-speed robot senses that are much faster than human senses, we are conducting research and development of information systems and devices that can achieve real-time image processing at 1000 frames/s or greater. As well as integrated algorithms to accelerate sensor information processing, we are also studying new sensing methodologies based on vibration and flow dynamics; they are too fast for humans to sense.
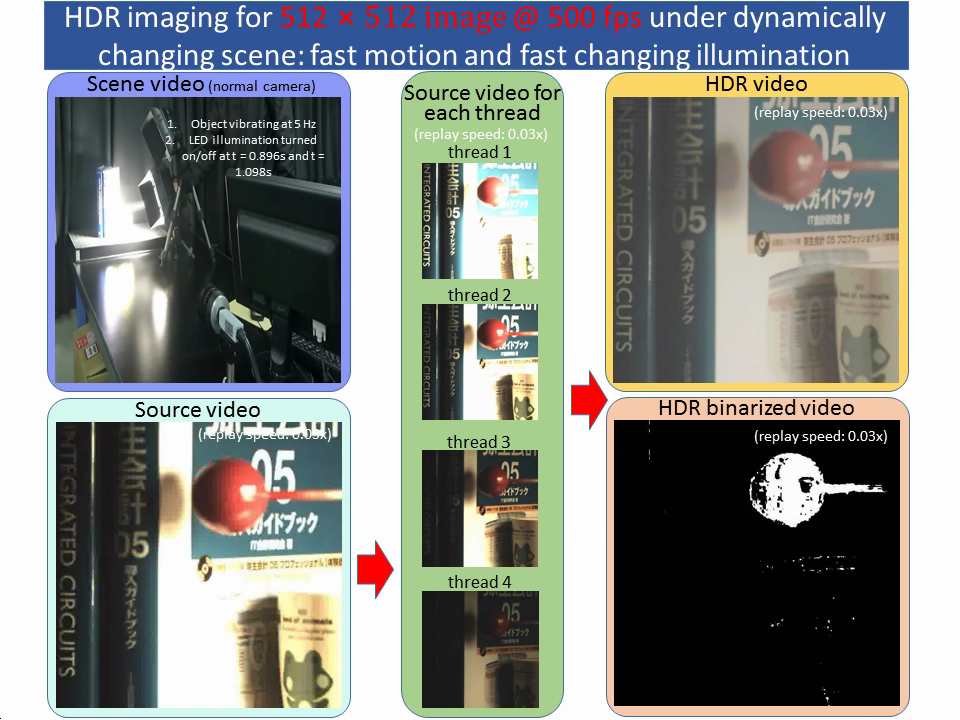
High-frame-rate High Dynamic Range Imaging
In this study, in order to obtain high frame rate (HFR) high dynamic range (HDR) image for robust image processing when the dynamic range of the real scene (0 – 2^16) is exceeding the camera’s dynamic range (0 – 255) limitation. We developed a real-time high frame rate (HFR) high dynamic range (HDR) imaging system at 500 fps from sequential 4 different low dynamic range (LDR) exposures. The exposure time of each LDR exposure is controlled by our high-speed virtual multi-thread exposure control module automatically.
Our automatic exposure (AE) control system is separated as 4 different threads virtually to simultaneously guarantee a best set of exposure times of the 4 sequential LDR images respectively at 125 fps. The exposure time is controlled based on different brightness saturation ratio of the corresponding image from each thread. Based on the 4 different exposed LDR images, for image processing acceleration, we introduced to use GPU board to realize a 500 fps HDR imaging system at real time. We have verified the effectiveness of our HFR HDR imaging system by performing experiment for a marker which is vibrating very fast at 5 Hz under a fast changing LED illumination.
Our automatic exposure (AE) control system is separated as 4 different threads virtually to simultaneously guarantee a best set of exposure times of the 4 sequential LDR images respectively at 125 fps. The exposure time is controlled based on different brightness saturation ratio of the corresponding image from each thread. Based on the 4 different exposed LDR images, for image processing acceleration, we introduced to use GPU board to realize a 500 fps HDR imaging system at real time. We have verified the effectiveness of our HFR HDR imaging system by performing experiment for a marker which is vibrating very fast at 5 Hz under a fast changing LED illumination.
 |
 |
wmv movie(45.2M) HFR HDR imaging |