RESEARCHES
Smart Vision & Robotic Sensing

Professor, Robotics Laboratory
Smart Innovation Program, Graduate School of Advanced Science and Engineering
Hiroshima University
Smart Innovation Program, Graduate School of Advanced Science and Engineering
Hiroshima University
Idaku ISHII
- >> Research Contents
- In order to establish high-speed robot senses that are much faster than human senses, we are conducting research and development of information systems and devices that can achieve real-time image processing at 1000 frames/s or greater. As well as integrated algorithms to accelerate sensor information processing, we are also studying new sensing methodologies based on vibration and flow dynamics; they are too fast for humans to sense.
GPU-based Full-pixel Optical Flow System
In this study, we develop a real-time full-pixel optical flow system that can simultaneously estimate pixelwise motion distributions of 512×512 images by accelerating the Lucas-Kanade method on a GPU-based high-speed vision system.
In this study, we propose a novel gradient-based optical flow method, which is an improved method of the Lucas-Kanade method, that can remarkably increase both the measurable range and the number of measurement points in optical flow estimation; product-sums of local gradients, whose difference intervals are adaptively adjusted to the estimated speed pixelwise, are acceleratedly computed by introducing their integral images. By implementing our proposed optical flow method on a GPU-based high-speed vision platform, full-pixel optical estimation of 512×512 images when the difference interval in brightness gradient calculation is fixed, can be executed in real time at 250 fps. When three difference intervals are adaptively adjusted in brightness gradient calculation, full-pixel flow estimation can be executed for 512×512 images at 250 fps, where its upper limit speed magnifies nine times, compared with that with the fixed difference interval. Several experimental results for real scenes such as rapid human motion show the effectiveness of our full-pixel optical flow system.
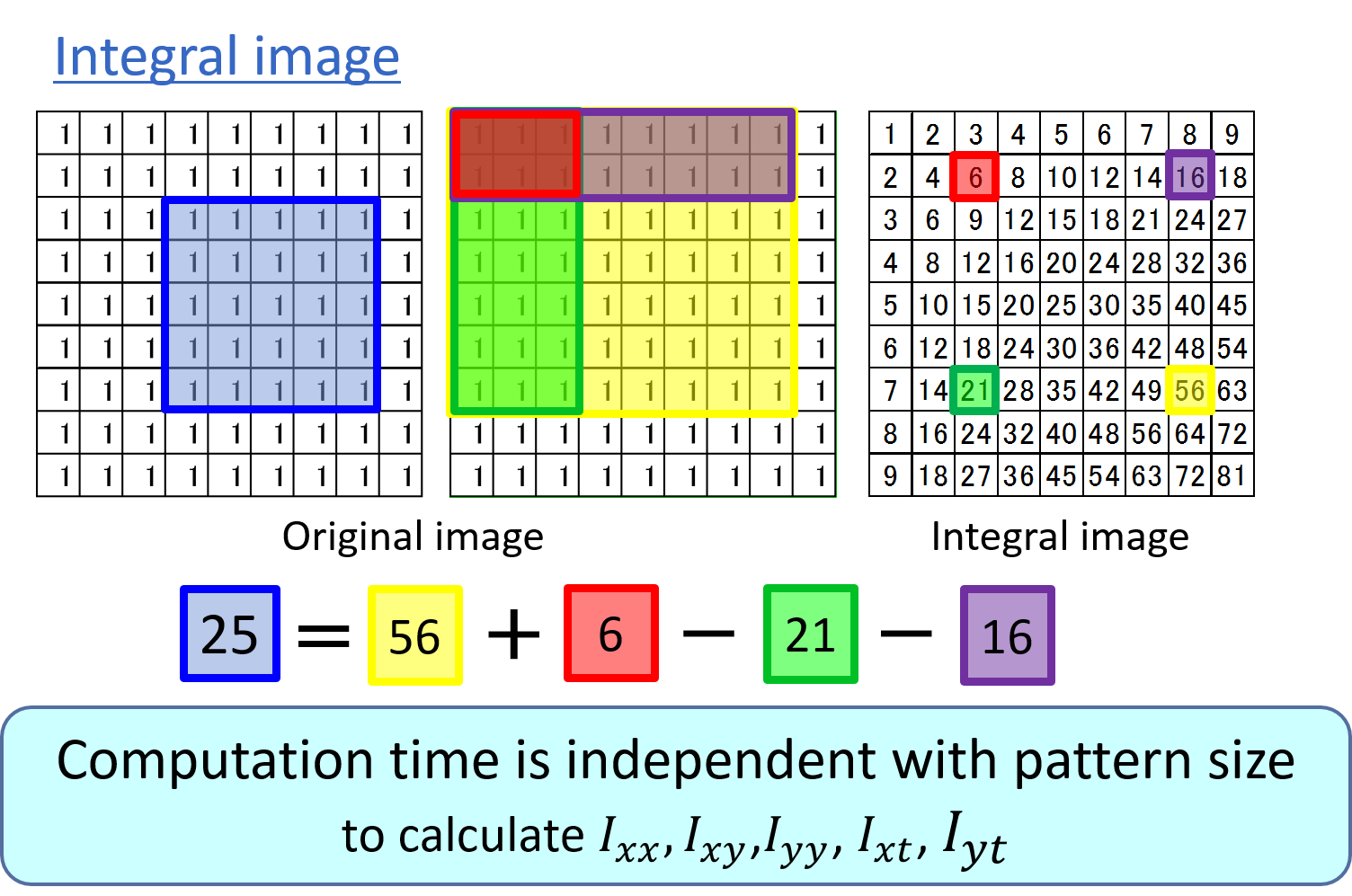
Fig. 1 : Using integral image to accelerate calculation of product-sums of local gradients
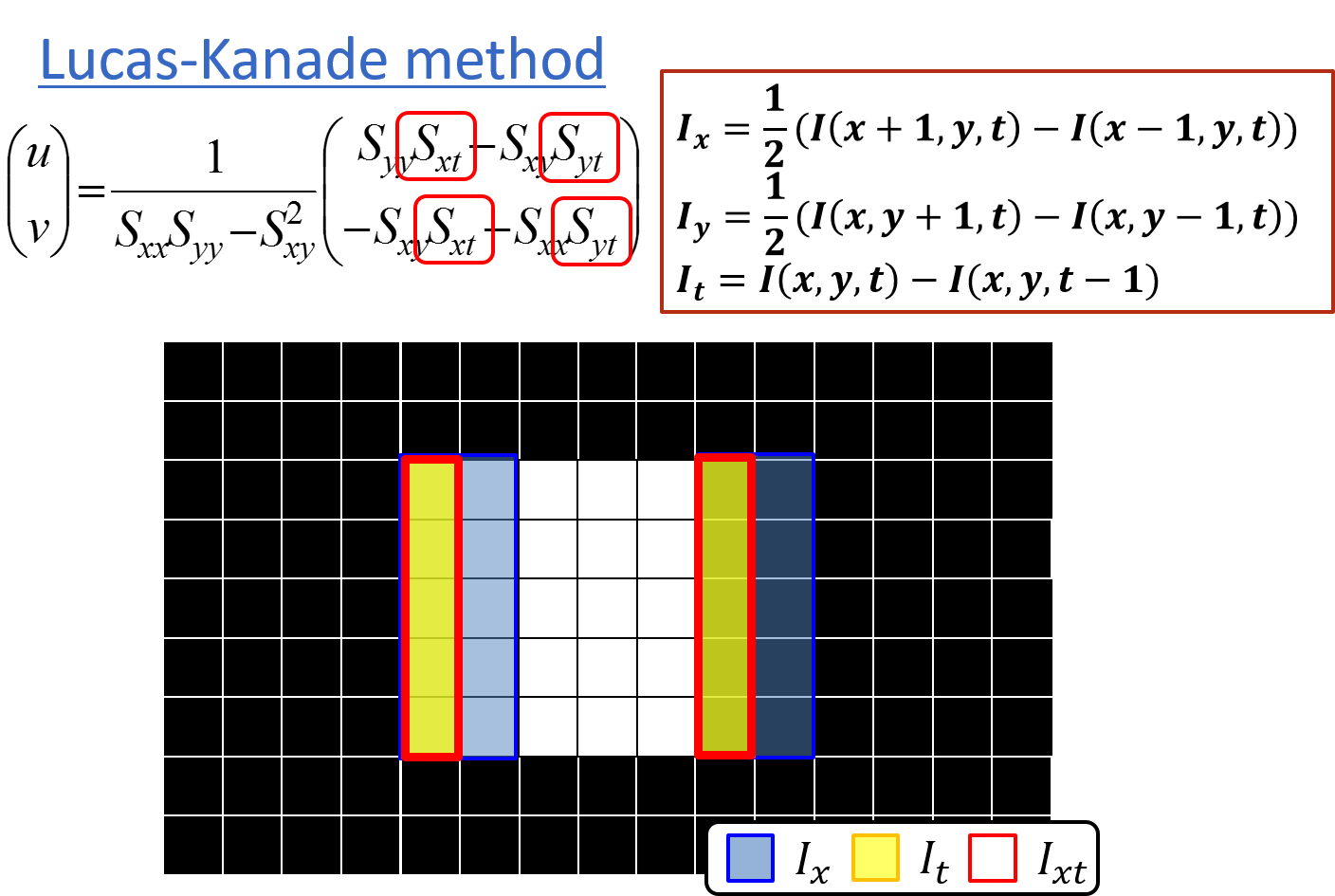
Fig. 2 : Traditional Lucas-Kanade method (d=1)
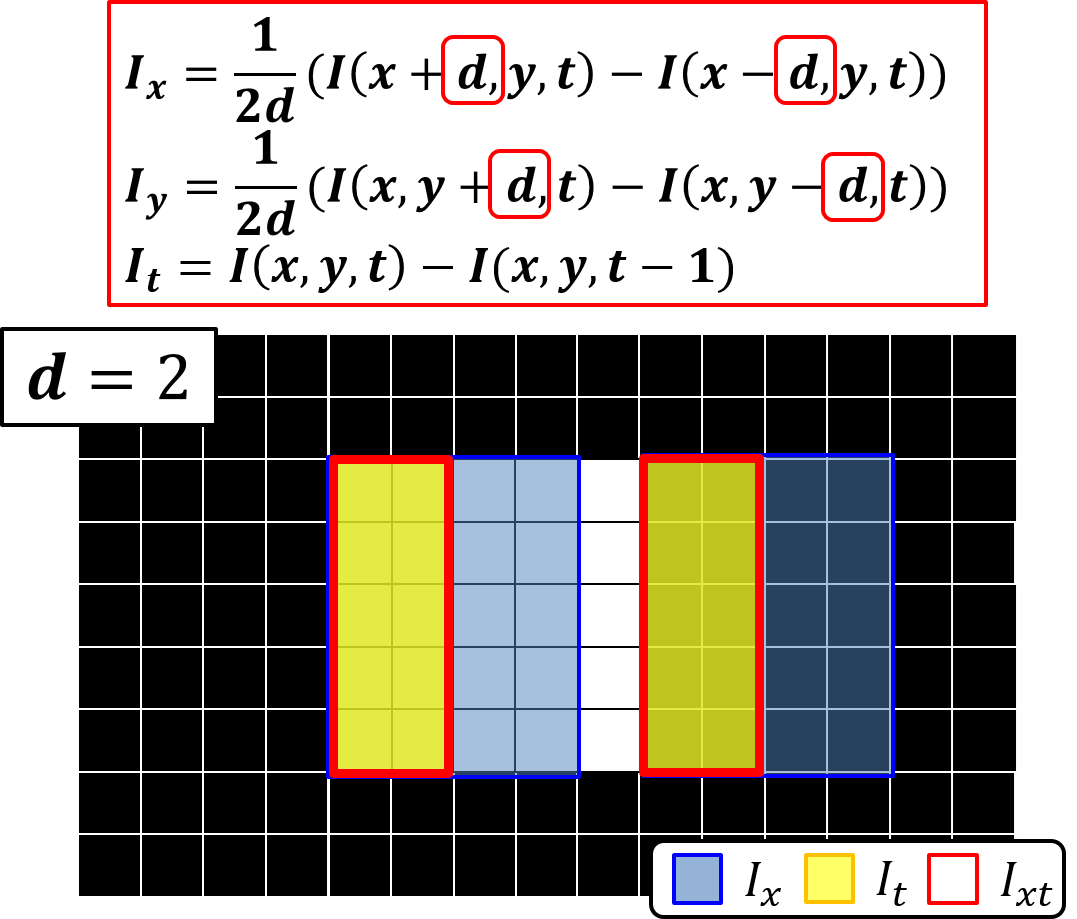
Fig. 3 : Our proposed method (d>1)
In this study, we propose a novel gradient-based optical flow method, which is an improved method of the Lucas-Kanade method, that can remarkably increase both the measurable range and the number of measurement points in optical flow estimation; product-sums of local gradients, whose difference intervals are adaptively adjusted to the estimated speed pixelwise, are acceleratedly computed by introducing their integral images. By implementing our proposed optical flow method on a GPU-based high-speed vision platform, full-pixel optical estimation of 512×512 images when the difference interval in brightness gradient calculation is fixed, can be executed in real time at 250 fps. When three difference intervals are adaptively adjusted in brightness gradient calculation, full-pixel flow estimation can be executed for 512×512 images at 250 fps, where its upper limit speed magnifies nine times, compared with that with the fixed difference interval. Several experimental results for real scenes such as rapid human motion show the effectiveness of our full-pixel optical flow system.
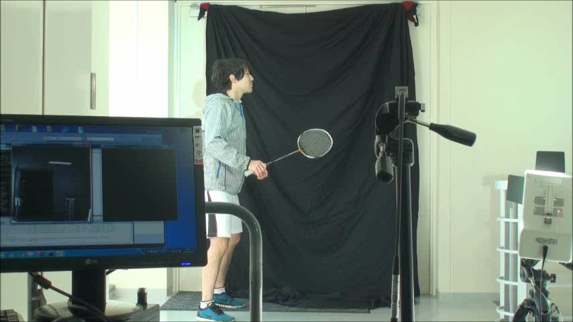 |
MP4 movie(9.7M) Drive shot motion |