RESEARCHES
Smart Vision & Robotic Sensing

Professor, Robotics Laboratory
Smart Innovation Program, Graduate School of Advanced Science and Engineering
Hiroshima University
Smart Innovation Program, Graduate School of Advanced Science and Engineering
Hiroshima University
Idaku ISHII
- >> Research Contents
- In order to establish high-speed robot senses that are much faster than human senses, we are conducting research and development of information systems and devices that can achieve real-time image processing at 1000 frames/s or greater. As well as integrated algorithms to accelerate sensor information processing, we are also studying new sensing methodologies based on vibration and flow dynamics; they are too fast for humans to sense.
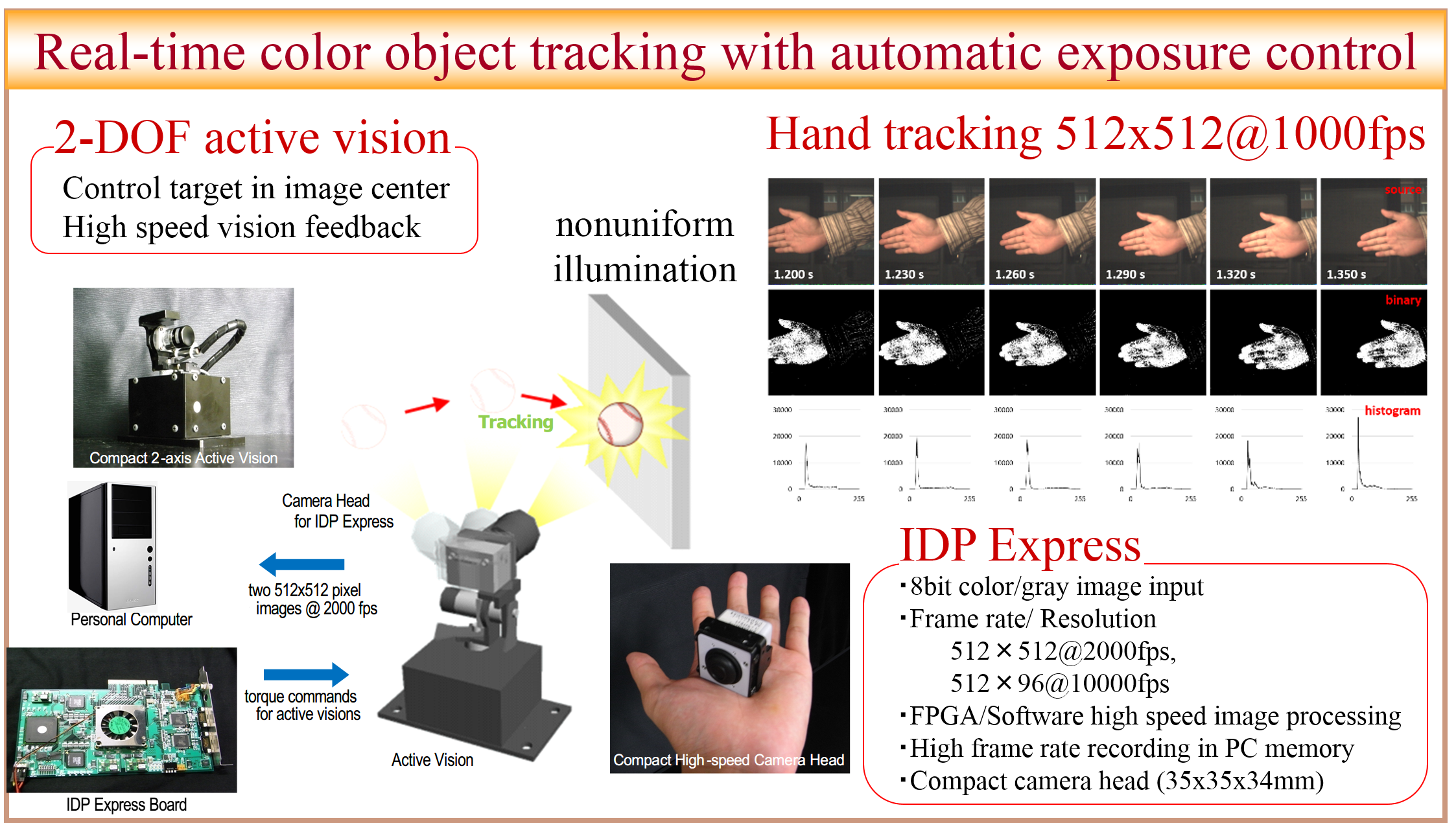
A High-Frame-Rate Vision System with Automatic Exposure Control
In this study, we present a high frame rate (HFR) vision system that can automatically control its exposure time by executing brightness histogram-based image processing in real time at a high frame rate.
Our aim is to obtain high-quality HFR images for robust image processing of high-speed phenomena even under dynamically changing illumination, such as lamps flickering at 100 Hz, corresponding to an AC power supply at 50/60 Hz.
Our vision system can simultaneously calculate a 256-bin brightness histogram for an 8-bit gray image of 512×512 pixels at 2000 fps by implementing a brightness histogram calculation circuit module as parallel hardware logic on an FPGA-based high-speed vision platform. Based on the HFR brightness histogram calculation, our method realizes automatic exposure (AE) control of 512×512 images at 2000 fps using our proposed AE algorithm. The proposed AE algorithm can maximize the number of pixels in the effective range of the brightness histogram, thus excluding much darker and brighter pixels, to improve the dynamic range of the captured image without over- and under-exposure.
The effectiveness of our HFR system with AE control is evaluated according to experimental results for several scenes with illumination flickering at 100 Hz, which is too fast for the human eye to see. We also applied our proposed HFR automatic exposure control algorithm into a fast color tracking system.
Our vision system can simultaneously calculate a 256-bin brightness histogram for an 8-bit gray image of 512×512 pixels at 2000 fps by implementing a brightness histogram calculation circuit module as parallel hardware logic on an FPGA-based high-speed vision platform. Based on the HFR brightness histogram calculation, our method realizes automatic exposure (AE) control of 512×512 images at 2000 fps using our proposed AE algorithm. The proposed AE algorithm can maximize the number of pixels in the effective range of the brightness histogram, thus excluding much darker and brighter pixels, to improve the dynamic range of the captured image without over- and under-exposure.
The effectiveness of our HFR system with AE control is evaluated according to experimental results for several scenes with illumination flickering at 100 Hz, which is too fast for the human eye to see. We also applied our proposed HFR automatic exposure control algorithm into a fast color tracking system.
 |
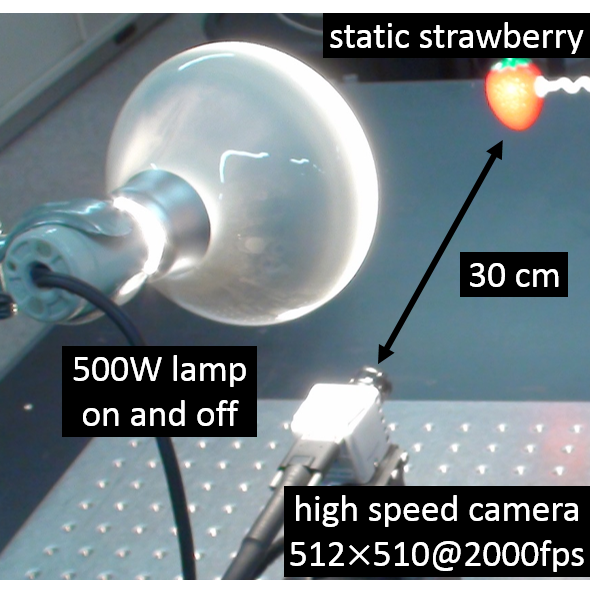 (a) Static scene: No AE WMV movie(8.1M) |
 (b) Static scene: With AE WMV movie(7.1M) |
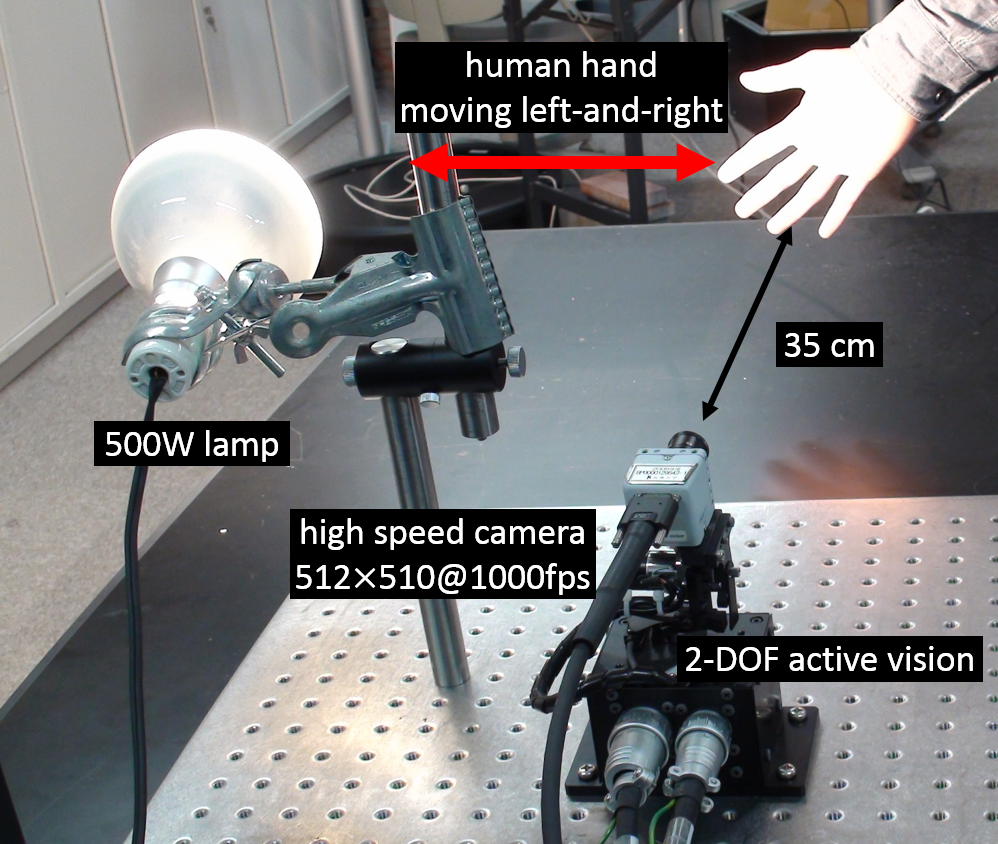 (c) Color object tracking: No AE WMV movie(6.9M) |
 (d) Color object tracking: With AE WMV movie(27.6M) |
Reference
- Qingyi Gu, Abdullah Al Noman, Tadayoshi Aoyama, Takeshi Takaki, and Idaku Ishii: A Fast Color Tracking System with Automatic Exposure Control, Proceeding of the IEEE International Conference on Information and Automation, pp.1302-1307, 2013.
- Qingyi Gu, Abdullah Al Noman, Tadayoshi Aoyama, Takeshi Takaki, and Idaku Ishii: A High-Frame-Rate Vision System with Automatic Exposure Control, IEICE transactions on Information and Systems, Vol.E97-D, No.4, pp.936-950, 2014.