RESEARCHES
Smart Vision & Robotic Sensing

Professor, Robotics Laboratory
Smart Innovation Program, Graduate School of Advanced Science and Engineering
Hiroshima University
Smart Innovation Program, Graduate School of Advanced Science and Engineering
Hiroshima University
Idaku ISHII
- >> Research Contents
- In order to establish high-speed robot senses that are much faster than human senses, we are conducting research and development of information systems and devices that can achieve real-time image processing at 1000 frames/s or greater. As well as integrated algorithms to accelerate sensor information processing, we are also studying new sensing methodologies based on vibration and flow dynamics; they are too fast for humans to sense.
Frame-Straddling-Based Optical Flow
In this study, we propose a novel method
for accurate optical flow estimation in real time for
both high-speed and low-speed moving objects based
on high-frame-rate (HFR) videos.
We introduce a frame-straddling function to select several pairs
of images with different frame intervals from an HFR image sequence even when the estimated optical flow is required to output at standard video rates (NTSC
at 30 fps and PAL at 25 fps).
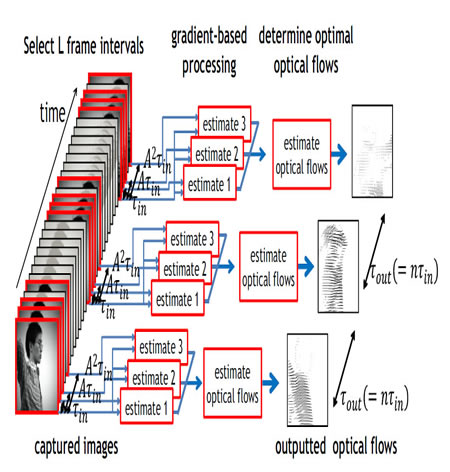 The frame-straddling function can remarkably improve the measurable
range of velocities in optical flow estimation without heavy computation by
adaptively selecting a small frame interval for high-speed objects and a large
frame interval for low-speed objects.
On the basis
of the relationship between the frame intervals and
the accuracies of the optical flows estimated by the
Lucas-Kanade method, we devise a method to determine
frame intervals in optical flow estimation
and select an optimal frame interval from these
intervals according to the amplitude of the estimated
optical flow.
Our method was implemented using software
on a high-speed vision platform, IDP Express.
The estimated optical flows were accurately outputted
at intervals of 40ms in real time by using three pairs
of 512×512 images; these images were selected by
frame-straddling a 2000-fps video with intervals of 0.5,
1.5, and 5 ms.
The frame-straddling function can remarkably improve the measurable
range of velocities in optical flow estimation without heavy computation by
adaptively selecting a small frame interval for high-speed objects and a large
frame interval for low-speed objects.
On the basis
of the relationship between the frame intervals and
the accuracies of the optical flows estimated by the
Lucas-Kanade method, we devise a method to determine
frame intervals in optical flow estimation
and select an optimal frame interval from these
intervals according to the amplitude of the estimated
optical flow.
Our method was implemented using software
on a high-speed vision platform, IDP Express.
The estimated optical flows were accurately outputted
at intervals of 40ms in real time by using three pairs
of 512×512 images; these images were selected by
frame-straddling a 2000-fps video with intervals of 0.5,
1.5, and 5 ms.
Several experiments were performed for high-speed movements to verify that our method can remarkably improve the measurable range of velocities in optical flow estimation, compared to optical flows estimated for 25-fps videos with the Lucas- Kanade method.
The frame-straddling function can remarkably improve the measurable
range of velocities in optical flow estimation without heavy computation by
adaptively selecting a small frame interval for high-speed objects and a large
frame interval for low-speed objects.
On the basis
of the relationship between the frame intervals and
the accuracies of the optical flows estimated by the
Lucas-Kanade method, we devise a method to determine
frame intervals in optical flow estimation
and select an optimal frame interval from these
intervals according to the amplitude of the estimated
optical flow.
Our method was implemented using software
on a high-speed vision platform, IDP Express.
The estimated optical flows were accurately outputted
at intervals of 40ms in real time by using three pairs
of 512×512 images; these images were selected by
frame-straddling a 2000-fps video with intervals of 0.5,
1.5, and 5 ms.
Several experiments were performed for high-speed movements to verify that our method can remarkably improve the measurable range of velocities in optical flow estimation, compared to optical flows estimated for 25-fps videos with the Lucas- Kanade method.
 |
punching motion WMV(5.3M) |
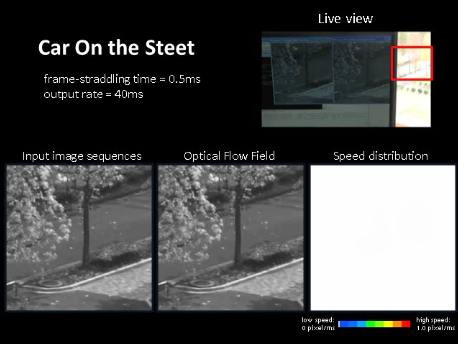 |
car on a street WMV(0.9M) |
Reference
- Lei Chen, Hua Yang, Takeshi Takaki, and Idaku Ishii :Real-Time Optical Flow Estimation Using Multiple Frame-Straddling Intervals, Journal of Robotics and Mechatronics, Vol.24, No.4, pp.686-698 (2012)
- Lei Chen, Takeshi Takaki, and Idaku Ishii : Accuracy of Gradient-Based Optical Flow Estimation in High-Frame-Rate Video Analysis, IEICE Transactions on Information and Systems Vol.E95-D, No.4, pp.1130-1141 (2012)
- Lei Chen, Hua Yang, Takeshi Takaki, andIdaku Ishii : Real-Time Frame-Straddling-Based Optical Flow Detection, Proc. IEEE Int. Conf. Robotics and Biomimetics, pp.2447-2452, 2011.