RESEARCHES
Smart Vision & Robotic Sensing

Professor, Robotics Laboratory
Smart Innovation Program, Graduate School of Advanced Science and Engineering
Hiroshima University
Smart Innovation Program, Graduate School of Advanced Science and Engineering
Hiroshima University
Idaku ISHII
- >> Research Contents
- In order to establish high-speed robot senses that are much faster than human senses, we are conducting research and development of information systems and devices that can achieve real-time image processing at 1000 frames/s or greater. As well as integrated algorithms to accelerate sensor information processing, we are also studying new sensing methodologies based on vibration and flow dynamics; they are too fast for humans to sense.
Fast Color-Histogram-Based Target Tracking
In this study, we introduces a high-speed vision system that can be applied to color-histogram-based tracking at 2000 fps by hardware implementing an improved CamShift algorithm.
In the improved CamShift algorithm, the size, position, and orientation of a color-patterned object to be tracked in an image can be simultaneously extracted using only the hardware implementation of a color histogram circuit module for calculating moment features of binary images quantized by 16 hue-based color bins.
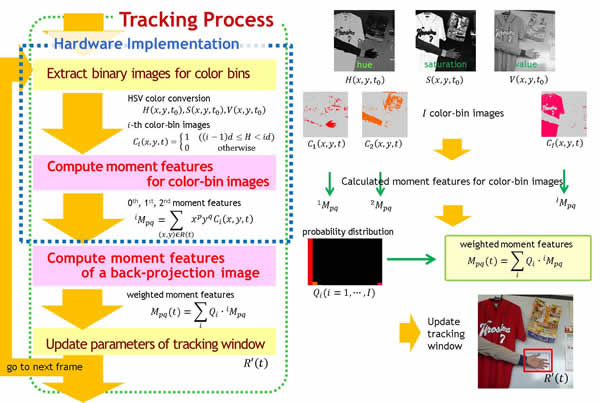
By hardware-implementing color histogram circuit modules on a high-speed vision platform, IDP Express, the improved CamShift algorithm enables color histogram-based tracking at 2000 fps for 512×511 pixel images in real time. By installing our tracking system on a two-axis mechanical active vision system, we demonstrate the effectiveness of 2000 fps color-histogram-based tracking by performing several experiments of color-patterned objects, which are always tracked in the camera views even when they move rapidly under complicated backgrounds.
By hardware-implementing color histogram circuit modules on a high-speed vision platform, IDP Express, the improved CamShift algorithm enables color histogram-based tracking at 2000 fps for 512×511 pixel images in real time. By installing our tracking system on a two-axis mechanical active vision system, we demonstrate the effectiveness of 2000 fps color-histogram-based tracking by performing several experiments of color-patterned objects, which are always tracked in the camera views even when they move rapidly under complicated backgrounds.
 |
WMV movie(0.9M) tracking of a rotating color-pattern |
 |
WMV movie(4.3M) tracking of a human hand |
Reference
- Idaku Ishii, Tetsuro Tatebe, Qingyi Gu, and Takeshi Takaki : Color-Histogram-Based Tracking at 2000 fps, Journal of Electronic Imaging, 21, 013010 (2012)
- Idaku Ishii, Tetsuro Tatebe, Qingyi Gu, and Takeshi Takaki : 2000 fps Real-time Target Tracking Vision System Based on Color Histogram, Proc. SPIE-IS&T Electronics Imaging 2011 meeting, Vol.7871, 787103, 2011.