RESEARCHES
Smart Vision & Robotic Sensing

Smart Innovation Program, Graduate School of Advanced Science and Engineering
Hiroshima University
- >> Research Contents
- In order to establish high-speed robot senses that are much faster than human senses, we are conducting research and development of information systems and devices that can achieve real-time image processing at 1000 frames/s or greater. As well as integrated algorithms to accelerate sensor information processing, we are also studying new sensing methodologies based on vibration and flow dynamics; they are too fast for humans to sense.
HFR-video-based Dynamic ImagePattern Recognition
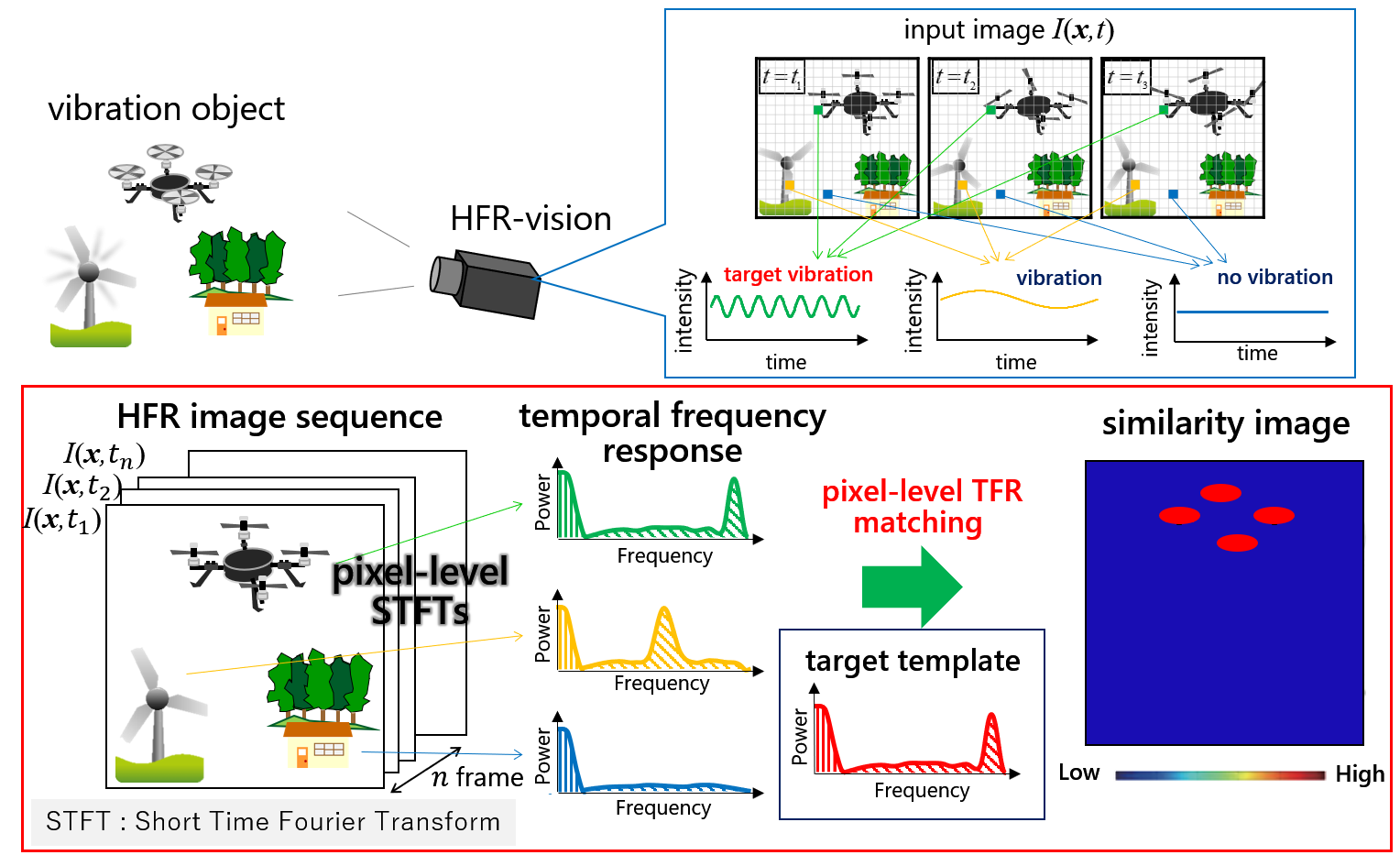
In this study, we propose a novel method for dynamics-based image-pattern recognition that can be used to inspect a specified vibrating pattern by computing temporal frequency responses in time-varying brightness signals at all the pixels of a high-frame-rate video sequence. The temporal frequency responses, which are the histograms of temporal frequency components in time-varying brightness signals, can be calculated using the short-term Fourier transform, and they are matched pixelwise with those of a reference vibrating pattern to determine whether a specific vibrating pattern is recognized. The effectiveness of our dynamics-based image pattern-recognition method is demonstrated using several vibration-source localization results for flying multicopters and insects, the rotating or flapping frequencies of which were in the range of hundreds of Hertz.
 |
 |
mp4 movie(9.5 MB) input video (1000fps) |
 |
mp4 movie(0.5 MB) extracted vibration region |
Reference
- Kohei Shimasaki, Tomoaki Okamura, Mingjun Jiang, Takeshi Takaki, Idaku Ishii, and Kazuhiko Yamamoto, HFR-video-based Image Pattern Recognition Using Pixel-level Temporal Frequency Response Matching, Proceedings of IEEE International Conference on Automation Science and Engineering, 2018.
- Kohei Shimasaki, Mingjun Jiang, Takeshi Takaki, Idaku Ishii, Real-Time Multicopter Detection Using Pixel-Level Digital Filters for Frame-Interpolated High-Frame-Rate Images, Proceedings of IEEE/ASME International Conference on Advanced Mechatronics, 2018.
- Nagahiro Fujiwara, Kohei Shimasaki, Mingjun Jiang, Takeshi Takaki, and Idaku Ishii. Pixel-Level Vibration Source Detection Using Undersampled Video Sequences, Proceedings of IEEE Sensors 2018, 2018.