RESEARCHES
Smart Mechanics Design & Manipulation

Professor, Robotics Laboratory
Smart Innovation Program, Graduate School of Advanced Science and Engineering
Hiroshima University
Smart Innovation Program, Graduate School of Advanced Science and Engineering
Hiroshima University
Takeshi TAKAKI
- >> Research Contents
- As basic robotic technologies for rapid and flexible responses in the real world, we are studying sensor-based manipulation combined with high-speed vision and also robot mechanisms that have built-in intelligence in order to realize manipulation that differs from that of humans.
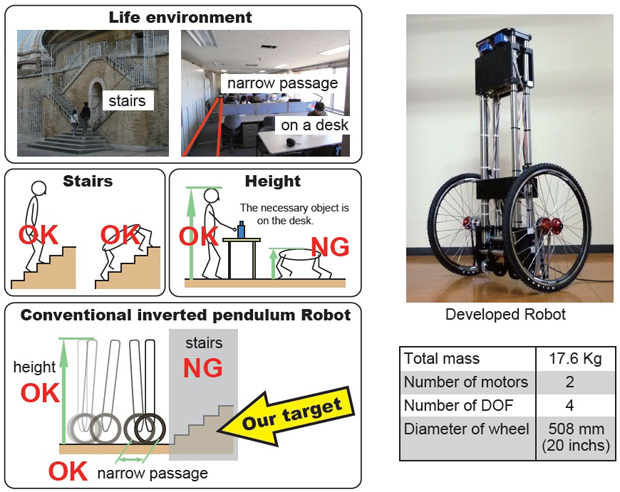
Inverted Pendulum Robot Capable of Climbing Stairs
Improved robot mobility is necessary in order to realize the expected uses of robots in the human life environment, which includes obstacles such as stairs and narrow passages.
Because objects which humans require are often located on desks or tables, which are at some height above ground level, a long vertical dimension is also necessary in the robot design.
To meet these requirements, this study focused on a type of mobile robot using an inverted pendulum, which enables a robot with a long vertical dimension to negotiate narrow passages.
Since it is difficult for inverted pendulum robots to climb steps, this study proposes a planetary wheel mechanism which makes it possible for an inverted pendulum robot to ascend differences in level.
This mechanism has an extremely simple structure, comprising a belt, pulley, and arm, and has the advantage of not requiring addition of a new actuator.
 |

|
MPEG movie (6.3 M) Disturbance to wheels |

|
MPEG movie (4.2 M) Difference in level with a height of 10 cm and disturbance |

|
MPEG movie (2.3 M) Difference in level with a height of 20 cm |

|
MPEG movie (4.6 M) Stairs with a height of 10 cm |

|
MPEG movie (4.6 M) Stairs with a height of 12-13 cm |