RESEARCHES
Smart Mechanics Design & Manipulation

Professor, Robotics Laboratory
Smart Innovation Program, Graduate School of Advanced Science and Engineering
Hiroshima University
Smart Innovation Program, Graduate School of Advanced Science and Engineering
Hiroshima University
Takeshi TAKAKI
- >> Research Contents
- As basic robotic technologies for rapid and flexible responses in the real world, we are studying sensor-based manipulation combined with high-speed vision and also robot mechanisms that have built-in intelligence in order to realize manipulation that differs from that of humans.
Real-time Flow-rate Control System for Cell Analysis
On-chip cell analysis is an important issue for microtechnology research.
One approach to controlling the fluid flow in microfluidic devices for cell analysis is to use syringe pumps.
However, it is difficult to control the actual flow rate in a microfluidic device because of the difficulty of placing flow rate sensors in the device.
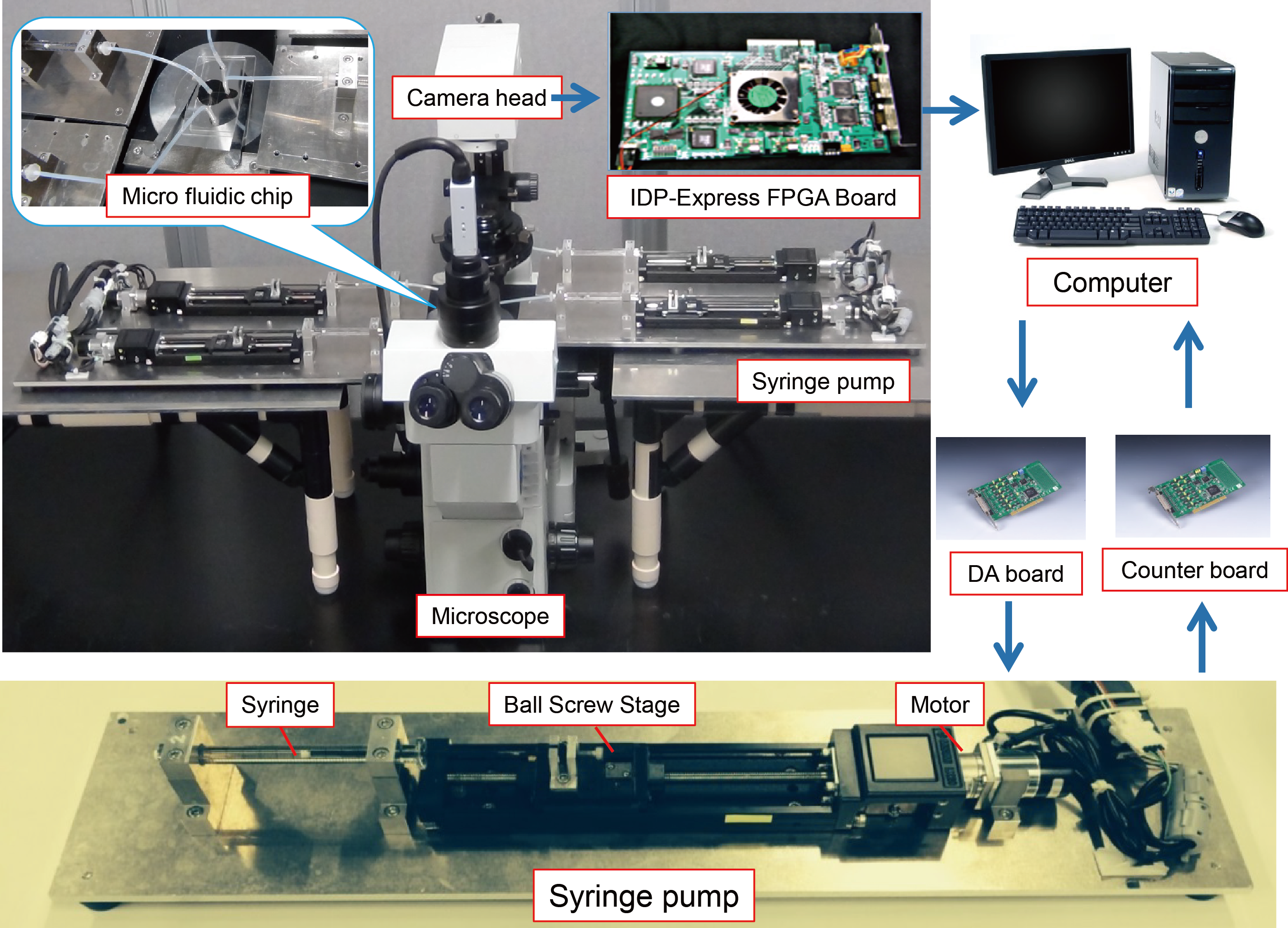
In this work, we developed a real-time flow-rate control system that uses syringe pumps and high-speed vision to measure the actual fluid flow in microfluidic devices.
The developed flow-rate control system was verified through experiments on microparticle velocity control and microparticle sorting.
 |
 |
MP4 movie(5.0M) Microparticle sorting experiment |
Reference
- Tadayoshi Aoyama, Amalka De Zoysa, Qingyi Gu, Takeshi Takaki, and Idaku Ishii: Vision-based Real-time Micro Flow-rate Control System for Cell Analysis, Journal of Robotics and Mechatronics, Vol.28, No.6, pp.854-861 (2016)
- Tadayoshi Aoyama, Amalka D. Zoysa, Qingyi Gu, Takeshi Takaki, and Idaku Ishii, Real-time Flow-rate Control System for Cell Analysis, Proceedings of Advances In Robotics (AIR’15), doi: 10.1145/2783449.2783499, 2015.