RESEARCHES
Smart Mechanics Design & Manipulation

Smart Innovation Program, Graduate School of Advanced Science and Engineering
Hiroshima University
- >> Research Contents
- As basic robotic technologies for rapid and flexible responses in the real world, we are studying sensor-based manipulation combined with high-speed vision and also robot mechanisms that have built-in intelligence in order to realize manipulation that differs from that of humans.
Hoop Manipulation
Generally, it is difficult to manipulate an object with a lot of degree of freedom (DOF) in little operation DOF.
however, even if there is much degree of freedom of the object, a specific posture might be taken.
If this is used, a part of the operation of the object can be manipulated even by little operation degree of freedom.
In this research, we consider the rotary motion of a hoop as such the movement and consider a strategy that we stabilize a hoop to a specific posture by rotating it with a stick which has it only by one degree of freedom and operate a position using dynamics.
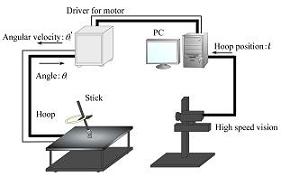
The experiment system is shown in the following figure.
The position of the hoop is in real time measured by a high-speed vision, the angular speed of the stick is one by one decided by PC, and the stick is rotated.
And, guard is set up at the center of the stick, and the state to hang the hoop on this guard is assumed to be an initial state as shown in the figure under the left.
 |
 |

|
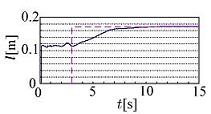
WMV movie (1.7 M) The hoop target position is constant. |
 |
|
|
WMV movie (2.9 M) The hoop target position changes. |
 |