RESEARCHES
Smart Vision & Robotic Sensing

Professor, Robotics Laboratory
Smart Innovation Program, Graduate School of Advanced Science and Engineering
Hiroshima University
Smart Innovation Program, Graduate School of Advanced Science and Engineering
Hiroshima University
Idaku ISHII
- >> Research Contents
- In order to establish high-speed robot senses that are much faster than human senses, we are conducting research and development of information systems and devices that can achieve real-time image processing at 1000 frames/s or greater. As well as integrated algorithms to accelerate sensor information processing, we are also studying new sensing methodologies based on vibration and flow dynamics; they are too fast for humans to sense.
A Fast Multi-camera Tracking System with Heterogeneous Lenses
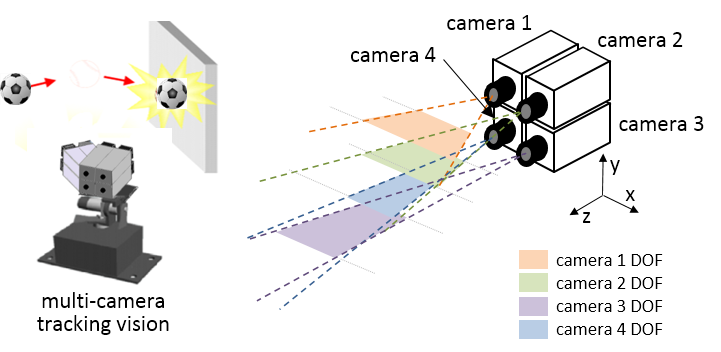
In this study, we develop a fast target tracking system that utilizes four cameras with lenses of different focal lengths to track an object without blurring images, even when the object moves in the depth direction away from the cameras in three-dimensional (3-D) space.
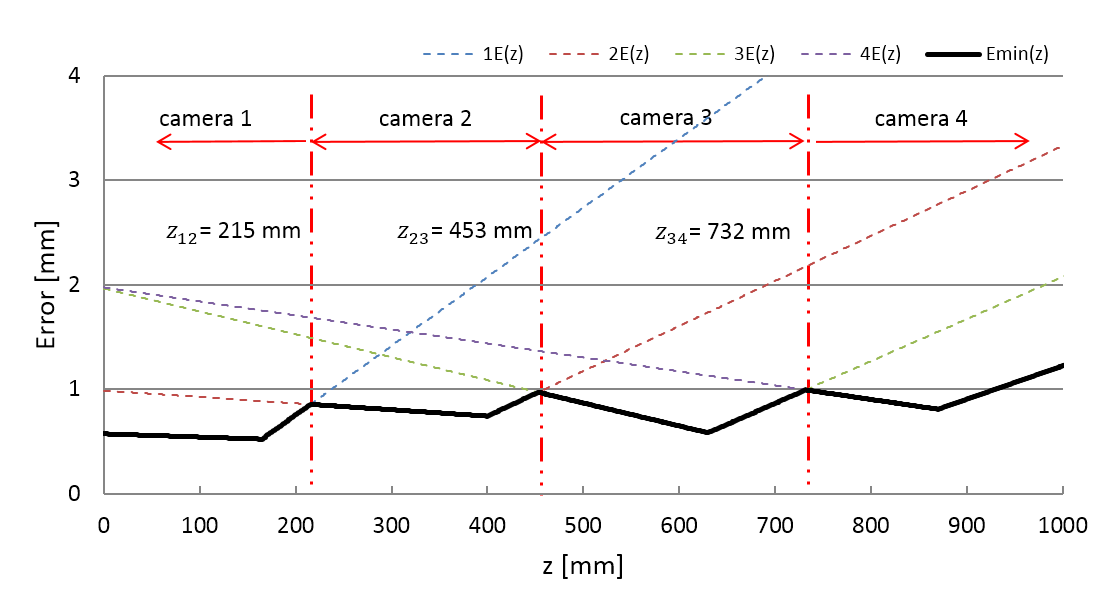
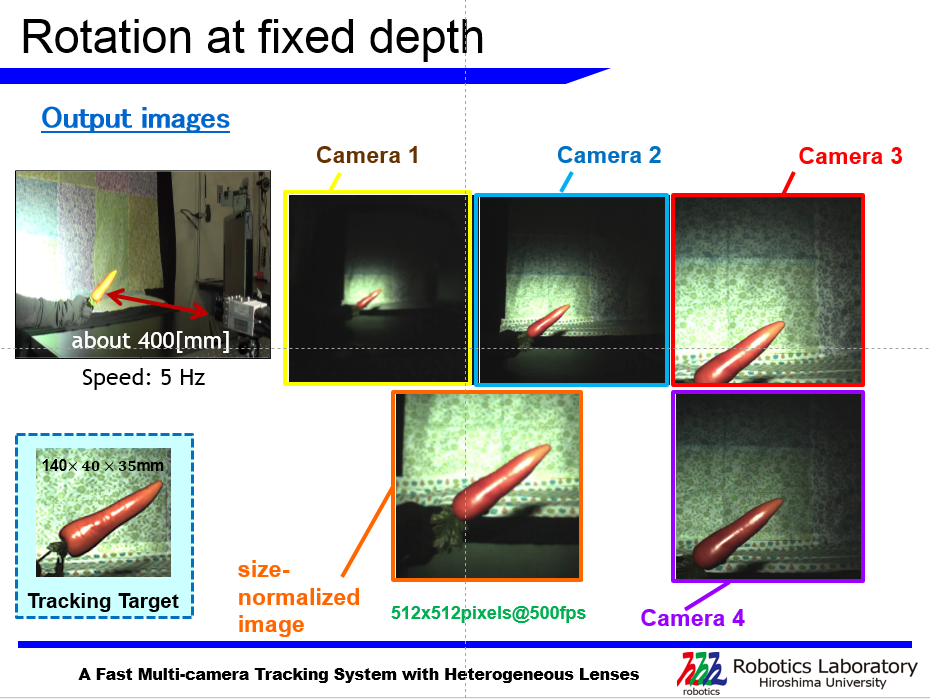
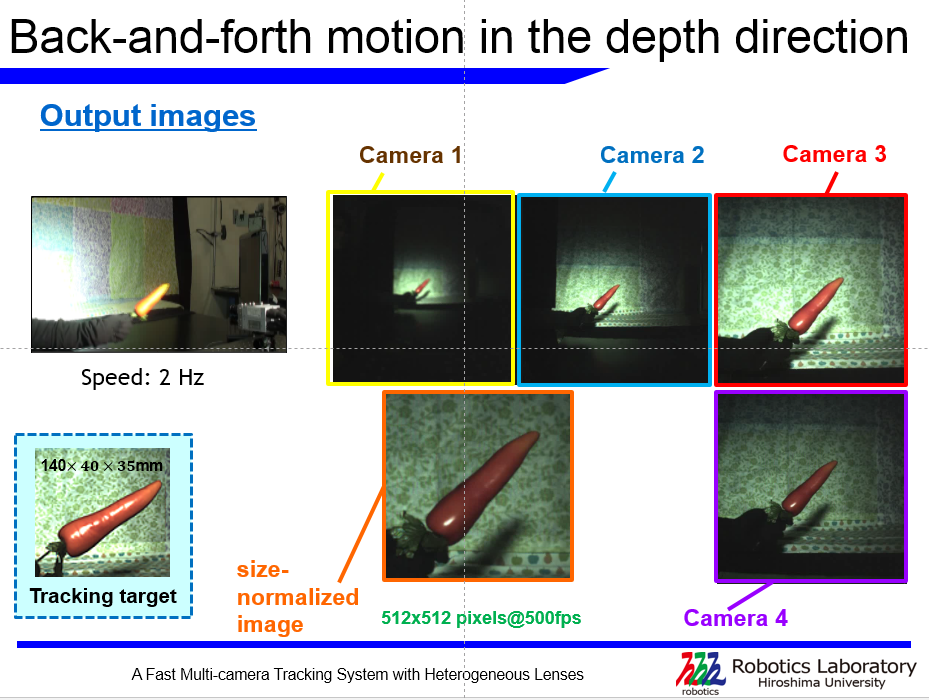
This system can maintain a well-focused camera view by switching among the four input images, instead of using lens motor control. The multi-camera system was mounted on a two-axis mechanical active vision platform. The active vision control and camera-view switching are executed by processing color 512×512 images from the four camera inputs at 500 fps in real time on a high-speed vision platform.
The performance of our system was verified by its tracking results for objects moving rapidly in 3-D space.
This system can maintain a well-focused camera view by switching among the four input images, instead of using lens motor control. The multi-camera system was mounted on a two-axis mechanical active vision platform. The active vision control and camera-view switching are executed by processing color 512×512 images from the four camera inputs at 500 fps in real time on a high-speed vision platform.
The performance of our system was verified by its tracking results for objects moving rapidly in 3-D space.
 |
 |
 |
WMV movie(1.3M) object tracking with multi-camera |
 |
WMV movie(0.9M) object tracking with multi-camera |