RESEARCHES
Smart Vision & Robotic Sensing

Professor, Robotics Laboratory
Smart Innovation Program, Graduate School of Advanced Science and Engineering
Hiroshima University
Smart Innovation Program, Graduate School of Advanced Science and Engineering
Hiroshima University
Idaku ISHII
- >> Research Contents
- In order to establish high-speed robot senses that are much faster than human senses, we are conducting research and development of information systems and devices that can achieve real-time image processing at 1000 frames/s or greater. As well as integrated algorithms to accelerate sensor information processing, we are also studying new sensing methodologies based on vibration and flow dynamics; they are too fast for humans to sense.
Real-Time Structure Light 3D Scanner at 500 fps
In this study, we develop a real-time, structured light 3D scanner that can output 3D video of 512×512 pixels at 500 fps using a GPU-based, high-speed vision system synchronized with a high-speed DLP projector.
Our 3D scanner projects eight pairs of positive and negative image patterns with 8-bit gray code on the measurement objects at 1000 fps.
Assuming HFR videos for capturing the light patterns projected at a high frame rate, we can decrease synchronization errors between the light patterns to much less than those when using standard videos at dozens of frames per second.
Synchronized with the high-speed vision platform IDP Express, these images arecaptured at 1000 fps and processed in real time for 3D image generation at 500fps by introducing parallel pixel processing on a NVIDIA Tesla 1060 GPU board.
To verify the performance of our 3D scanner that can output 3D images of 512×512 pixels at 500fps, we show experimental results for several types of moving scenario: (a) a moving human hand, (b) a rippling liquid surface, and (c) human fingers tapping keys on a computer keyboard.
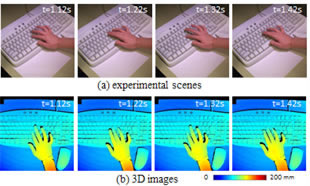
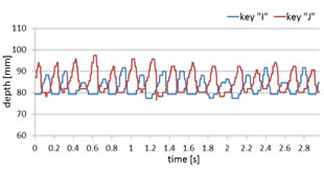
alternative finger tapping on a computer keyboard (7-8 times/s)
alternative finger tapping on a computer keyboard (7-8 times/s)
 |
500fps depth measurement MP4(8.4M) |