RESEARCHES
Smart Vision & Robotic Sensing

Professor, Robotics Laboratory
Smart Innovation Program, Graduate School of Advanced Science and Engineering
Hiroshima University
Smart Innovation Program, Graduate School of Advanced Science and Engineering
Hiroshima University
Idaku ISHII
- >> Research Contents
- In order to establish high-speed robot senses that are much faster than human senses, we are conducting research and development of information systems and devices that can achieve real-time image processing at 1000 frames/s or greater. As well as integrated algorithms to accelerate sensor information processing, we are also studying new sensing methodologies based on vibration and flow dynamics; they are too fast for humans to sense.
Self-Projected Light-Section Method for Fast 3D Shape Inspection
In this study, we proposed a novel light-section method for fast 3D shape inspection that can reduce the pixel dimensions of the image to be processed and developed a real-time high-frame-rate 3D shape measurement system at 10000 fps by integrating our method on a high-speed vision system.
Instead of a straight-line light pattern projection, we use a curved-line light pattern for projection on an object to be inspected. In the mean time, a straight-line slit image in a camera view can be captured as a reduced image for fast triangulation computation when the 3D shape is matched with that of the reference object. The self-projected light pattern works as a template for 3D shape inspection, because our method can directly calculate differential height information from the 3D shape of the reference object by introducing a self-projected light pattern projection. Thus, even small differences in the 3D shape between a measurement object and a reference object can be enhanced in a narrower image region when their shapes are strongly concave or convex.
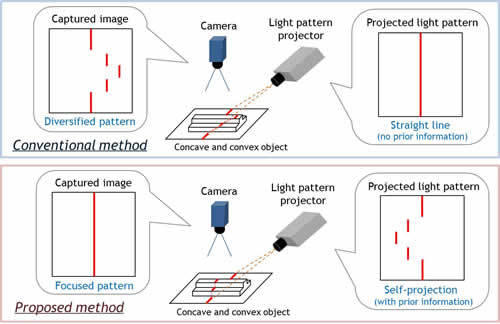
The self-projected light-section method includes two subprocesses for inspecting the 3D shapes of cylinder-like objects: (1) self-projected light pattern generation and (2) differential 3D shape measurement. On our system, the subprocess of self-projected light pattern generation is executed offline by scanning a straight-line light pattern from left to right on the projector image plane. The subprocess of differential 3D shape measurement was executed for 96×512 pixel images in real time at 10000fps. It was accelerated by implementing the column-moment calculation circuit module on the IDP Express FPGA board.
We measured a mountain-shaped cylinder and a stair-shaped cylinder carved with marks with both conventional light-section method and the proposed method. The result indicates that our method enables both global 3D shape measurement and local abnormality inspection in real time to the same accuracy level as the conventional light-section method, even when the measurement object has different heights that would require a large-size image region in the conventional method.

Instead of a straight-line light pattern projection, we use a curved-line light pattern for projection on an object to be inspected. In the mean time, a straight-line slit image in a camera view can be captured as a reduced image for fast triangulation computation when the 3D shape is matched with that of the reference object. The self-projected light pattern works as a template for 3D shape inspection, because our method can directly calculate differential height information from the 3D shape of the reference object by introducing a self-projected light pattern projection. Thus, even small differences in the 3D shape between a measurement object and a reference object can be enhanced in a narrower image region when their shapes are strongly concave or convex.
The self-projected light-section method includes two subprocesses for inspecting the 3D shapes of cylinder-like objects: (1) self-projected light pattern generation and (2) differential 3D shape measurement. On our system, the subprocess of self-projected light pattern generation is executed offline by scanning a straight-line light pattern from left to right on the projector image plane. The subprocess of differential 3D shape measurement was executed for 96×512 pixel images in real time at 10000fps. It was accelerated by implementing the column-moment calculation circuit module on the IDP Express FPGA board.
We measured a mountain-shaped cylinder and a stair-shaped cylinder carved with marks with both conventional light-section method and the proposed method. The result indicates that our method enables both global 3D shape measurement and local abnormality inspection in real time to the same accuracy level as the conventional light-section method, even when the measurement object has different heights that would require a large-size image region in the conventional method.
 |
self-projected pattern generation WMV(0.7M) |
 |
3D shape measurement at 10000 fps WMV(0.2M) |
Reference
- Hao Gao, Qingyi Gu, Takeshi Takaki, and Idaku Ishii : A Self-Projected Light-Section Method for Fast Three-Dimensional Shape Inspection,International Journal of Optomechatronics, Vol. 6, No. 4, pp.289-303 (2012)
- Hao Gao, Qingyi Gu, Takeshi Takaki, and Idaku Ishii: A Self-Projected Light-Section Method for Fast Three-Dimensional Shape Inspection, Proc. of the 2011 IEEE International Symposium on Optomechatronic Technologies, 2011.