RESEARCHES
Smart Vision & Robotic Sensing

Professor, Robotics Laboratory
Smart Innovation Program, Graduate School of Advanced Science and Engineering
Hiroshima University
Smart Innovation Program, Graduate School of Advanced Science and Engineering
Hiroshima University
Idaku ISHII
- >> Research Contents
- In order to establish high-speed robot senses that are much faster than human senses, we are conducting research and development of information systems and devices that can achieve real-time image processing at 1000 frames/s or greater. As well as integrated algorithms to accelerate sensor information processing, we are also studying new sensing methodologies based on vibration and flow dynamics; they are too fast for humans to sense.
Real-time Quantification of Mice’s Scratching Behavior
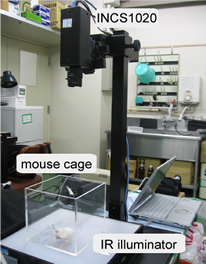 In this study, we developed a novel real-time motion analysis system for detecting the scratching behavior of laboratory mice in long-time experiments, which enables automated behavior quantification for new drug development in diseases such as atopic dermatitis and so on. This system can detect quick movements of laboratory mice, such as scratching, by introducing a specially designed high-speed vision system INCS1020 that can calculate the frame-to-frame difference at a frame rate of 240 fps (frames per second).
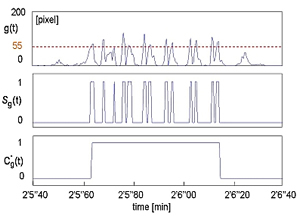
In this study, we developed a novel real-time motion analysis system for detecting the scratching behavior of laboratory mice in long-time experiments, which enables automated behavior quantification for new drug development in diseases such as atopic dermatitis and so on. This system can detect quick movements of laboratory mice, such as scratching, by introducing a specially designed high-speed vision system INCS1020 that can calculate the frame-to-frame difference at a frame rate of 240 fps (frames per second). Quantification algorithm was also implemented for distinguishing scratching behavior from other behaviors. In fact, we evaluated the effectiveness of our system by demonstrating the experimental results of scratching behavior detection during 20 minutes observation of several ICR mice administered with compound 48/80 to induce frequent scratching. The following graphs are examples of the results in 1 second with regard to scratching. (g(t):frame-to-frame difference feature, C’g(t):detection result).
 |
MPG movie(0.3MB) Scratching |
 |
Reference
- Yuman Nie, Idaku Ishii, Akane Tanaka and Hiroshi Matsuda : Automatic Scratching Analyzing System for Laboratory Mice: SCLABA-Real, Human-Centric Machine Vision (M. Chessa, F. Solari and S.P. Sabatini, eds.), INTECH (2012)
- Yuman Nie, Idaku Ishii, Kenkichi Yamamoto, Kensuke Orito, and Hiroshi Matsuda : Real-time Scratching Behavior Quantification System for Laboratory Mice Using High-speed Vision, Journal of Real-Time Image Processing, Vol.4, No.2, pp.181-190 (2009)
- Idaku Ishii, Shogo Kurozumi, Kensuke Orito, and Hiroshi Matsuda : Automatic Scratching Pattern Detection for Laboratory Mice using High-speed Video Images, IEEE Transactions on Automation Science and Engineering, Vol.5, No.1, pp.176-182 (2008)
- Idaku Ishii, Yuman Nie, Kenkichi Yamamoto, Kensuke Orito, and Hiroshi Matsuda : Real-time and Long-time Quantification of Behavior of Laboratory Mice Scratching,Proc. Int. IEEE Conf. on Automation Science and Engineering, pp.629-633, 2007.