研究内容RESEARCHES
Smart Vision & Robotic Sensing
高速ビジョン・ロボットセンシング

- >> 研究テーマ
- 1秒間に1000コマ以上の実時間画像処理を実現する高速ビジョン技術を始めとして、人間の感覚能力を遥かに上回る実時間センシング技術の確立を目指した情報システム/デバイスの研究開発を行うとともに、高速化・集積化を念頭においたアルゴリズムの研究、さらには人間には感じとることが難しい振動ダイナミクス等の情報を積極的利用した新たなセンシング技術の実現を目指します。
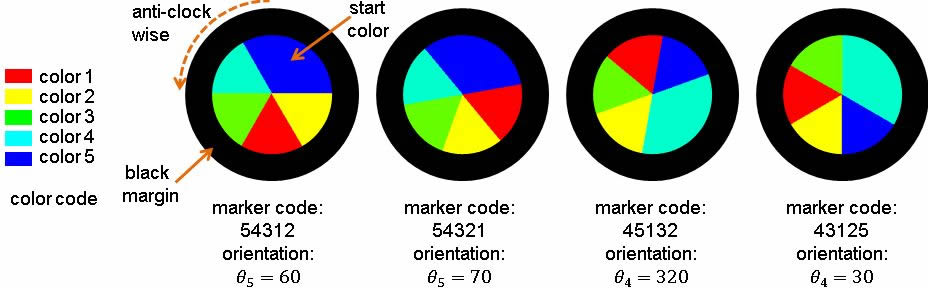
パイ型マーカーを用いた高速モーションキャプチャ
本研究では,512×512画像における複数色から構成されるパイ形状マーカーを2000 fpsで追跡する実時間高速カラービジョンシステムを開発した.
開発したカラービジョンシステムは,4096個の8×8セルに分割した512×512画素画像を読み取る間にカラーラベリングされた領域の0次,1次モーメント特徴を計算することが可能な6つのセルベースドラベリングモジュールを持つ.
計算された0次,1次モーメント特徴からパイ形状マーカーにおける5つの色領域の幾何学的分布を調べることにより,512×512画像内の複数パイ形状マーカーのIDコード,位置,姿勢を瞬時に2000 fpsで計算可能である.
開発システムを評価するために,パイ形状マーカーを複数貼付した平面や円柱形状を高速回転させた場合について,2000fpsで512×512画素画像の複数マーカー追跡実験を行い,オクルージョン等に対しても複数のパイ形状マーカーを頑強かつ高速に追跡できることを確認した.
 |
WMV movie(14.8M) tracking of a rotating color-pattern |
 |
WMV movie(7.5M) tracking of a rotating color-pattern |
参考文献
- Qingyi Gu, Tadayoshi Aoyama, Takeshi Takaki, and Idaku Ishii : Fast Tracking System for Multi-colored Pie-shaped Markers, International Journal of Optomechatronics, Vol.7, No.3, pp.160-180 (2013)
- Qingyi Gu, Tadayoshi Aoyama, Takeshi Takaki, and Idaku Ishii: Fast Tracking System for Multi-colored Pie-Shaped Markers, Proceedings of International Symposium on Optomechatronic Technologies, 2012.