研究内容RESEARCHES
Smart Vision & Robotic Sensing
高速ビジョン・ロボットセンシング

- >> 研究テーマ
- 1秒間に1000コマ以上の実時間画像処理を実現する高速ビジョン技術を始めとして、人間の感覚能力を遥かに上回る実時間センシング技術の確立を目指した情報システム/デバイスの研究開発を行うとともに、高速化・集積化を念頭においたアルゴリズムの研究、さらには人間には感じとることが難しい振動ダイナミクス等の情報を積極的利用した新たなセンシング技術の実現を目指します。
全画素GPUベースドオプティカルフローシステム
本研究では,実時間全画素オプティカルフローシステムを開発した.
開発したシステムは,GPUベースド高速ビジョンシステムに実装されたLucas-Kanade法により,512×512画素画像の速度分布を同時推定することが可能である.
本システムでは,オプティカルフローの計測範囲と計測点が著しく増加したLucas-Kanade法をベースにした新たな輝度勾配オプティカルフロー推定法を提案しており,局所勾配の積和値がインテグラルイメージを用いることで高速に計算されている. このオプティカルフロー推定法をGPUベースド高速ビジョンシステムに実装することにより,512×512画素画像の全画素オプティカルフロー推定を250fpsで実時間実行することが可能である. 実際の素早い人間の動きの速度推定を行う実験結果により,開発した全画素オプティカルフローシステムの有効性を確認した.
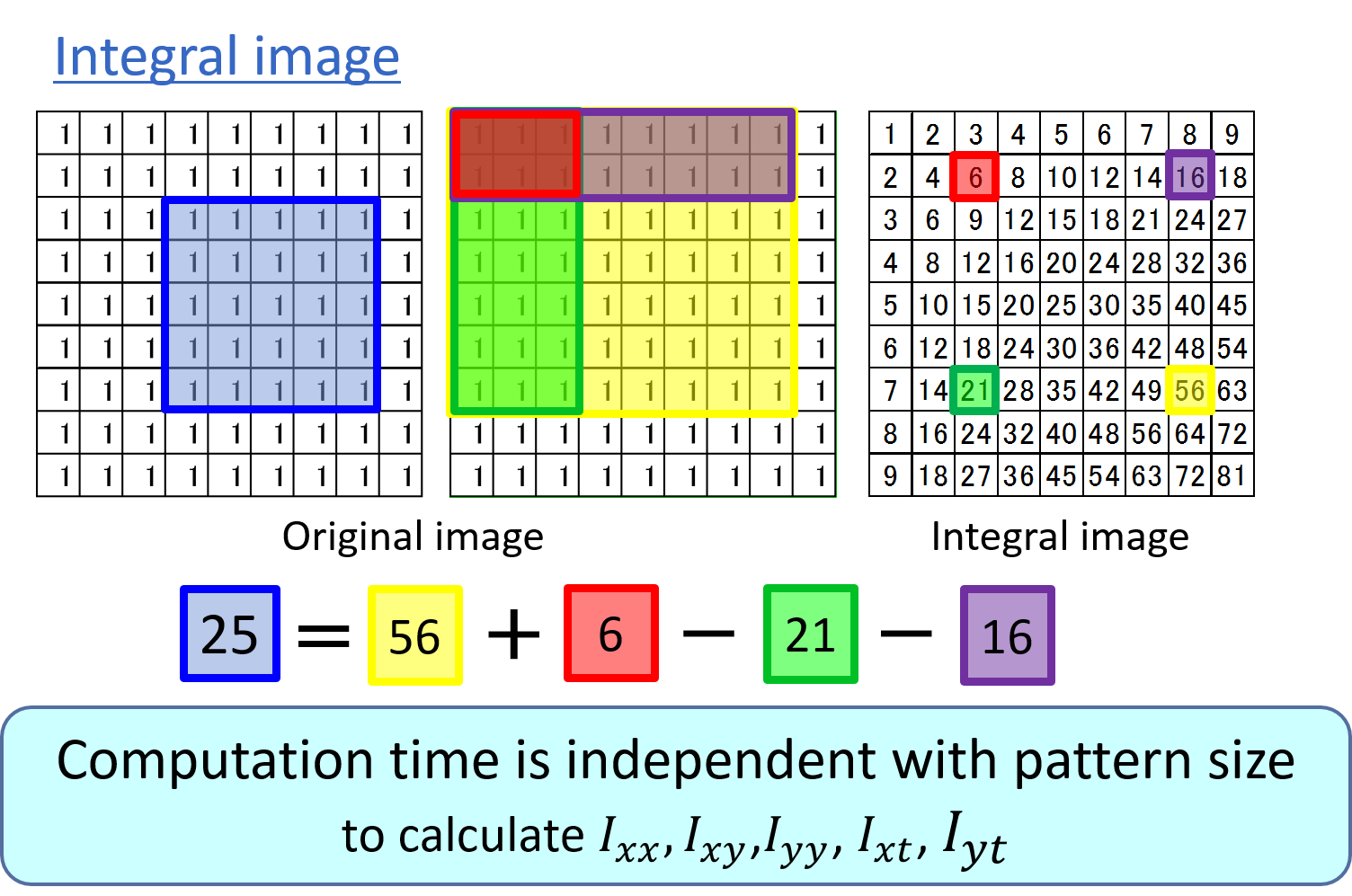
Fig. 1 : Using integral image to accelerate calculation of product-sums of local gradients
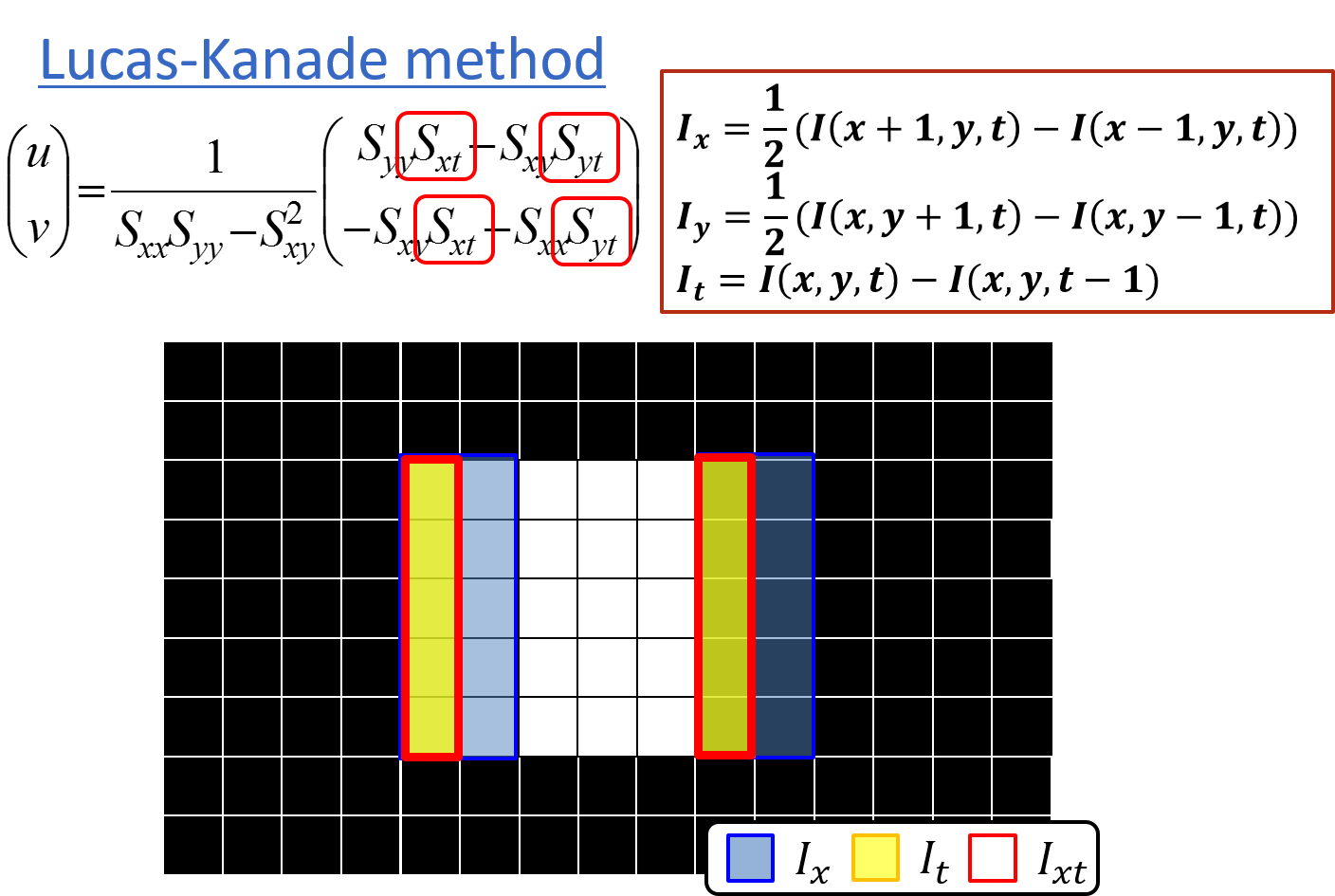
Fig. 2 : Traditional Lucas-Kanade method (d=1)
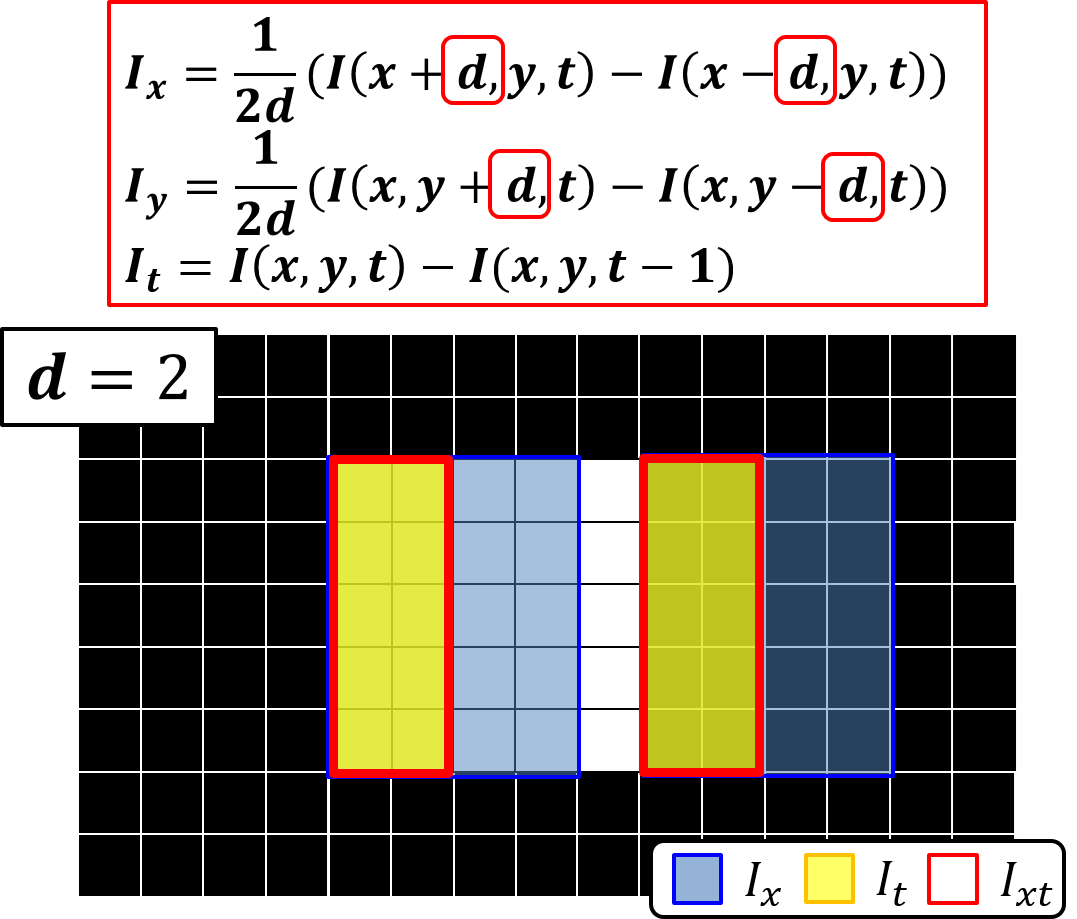
Fig. 3 : Our proposed method (d>1)
本システムでは,オプティカルフローの計測範囲と計測点が著しく増加したLucas-Kanade法をベースにした新たな輝度勾配オプティカルフロー推定法を提案しており,局所勾配の積和値がインテグラルイメージを用いることで高速に計算されている. このオプティカルフロー推定法をGPUベースド高速ビジョンシステムに実装することにより,512×512画素画像の全画素オプティカルフロー推定を250fpsで実時間実行することが可能である. 実際の素早い人間の動きの速度推定を行う実験結果により,開発した全画素オプティカルフローシステムの有効性を確認した.
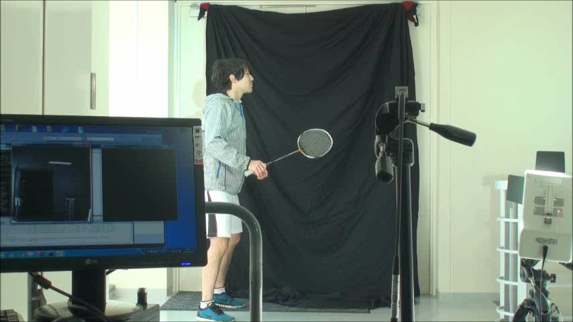 |
MP4 movie(9.7M) Drive shot motion |