研究内容RESEARCHES
Smart Vision & Robotic Sensing
高速ビジョン・ロボットセンシング

- >> 研究テーマ
- 1秒間に1000コマ以上の実時間画像処理を実現する高速ビジョン技術を始めとして、人間の感覚能力を遥かに上回る実時間センシング技術の確立を目指した情報システム/デバイスの研究開発を行うとともに、高速化・集積化を念頭においたアルゴリズムの研究、さらには人間には感じとることが難しい振動ダイナミクス等の情報を積極的利用した新たなセンシング技術の実現を目指します。
高速ビジョンを用いた実時間形態学的細胞分析システム
本研究では,高速ビジョンプラットフォーム上へ複数対象の特長抽出アルゴリズムを実装することで,マイクロチャネル内で高速に流れる細胞に対する実時間形態学的分析システムを提案する.
2000fpsの512×256画像において,モーメント特長と複数の細胞のバウンディングボックスの抽出を回路実装することで,実時間でビデオ処理が実行される. 抽出された細胞の領域は,適切なサイズに線形に縮小し,実時間の画像ベースの形態学的分析のためにFIFOバッファに格納される. 処理時間を短縮するため,ハードウェアロジックを用いて細胞領域のバウンディングボックスを抽出し,細胞領域を適切なサイズへ縮小することで,高速ビジョンシステムはマイクロチャネル内の高速な流れにおいて,2 ms/cellの速度で細胞の高速な形態学的分析を行うことが可能である.
マイクロチャネル内で高速に流れるウニ胚の大きさ,偏心度,透明度を実時間解析する実験を行い,提案した画像ベースの解析システムの有効性を検証した.
2000fpsの512×256画像において,モーメント特長と複数の細胞のバウンディングボックスの抽出を回路実装することで,実時間でビデオ処理が実行される. 抽出された細胞の領域は,適切なサイズに線形に縮小し,実時間の画像ベースの形態学的分析のためにFIFOバッファに格納される. 処理時間を短縮するため,ハードウェアロジックを用いて細胞領域のバウンディングボックスを抽出し,細胞領域を適切なサイズへ縮小することで,高速ビジョンシステムはマイクロチャネル内の高速な流れにおいて,2 ms/cellの速度で細胞の高速な形態学的分析を行うことが可能である.
マイクロチャネル内で高速に流れるウニ胚の大きさ,偏心度,透明度を実時間解析する実験を行い,提案した画像ベースの解析システムの有効性を検証した.
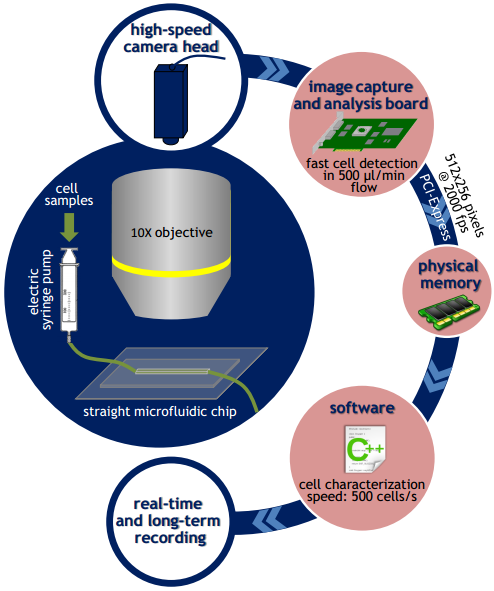 |
Fig. 1: Concept of our system. |
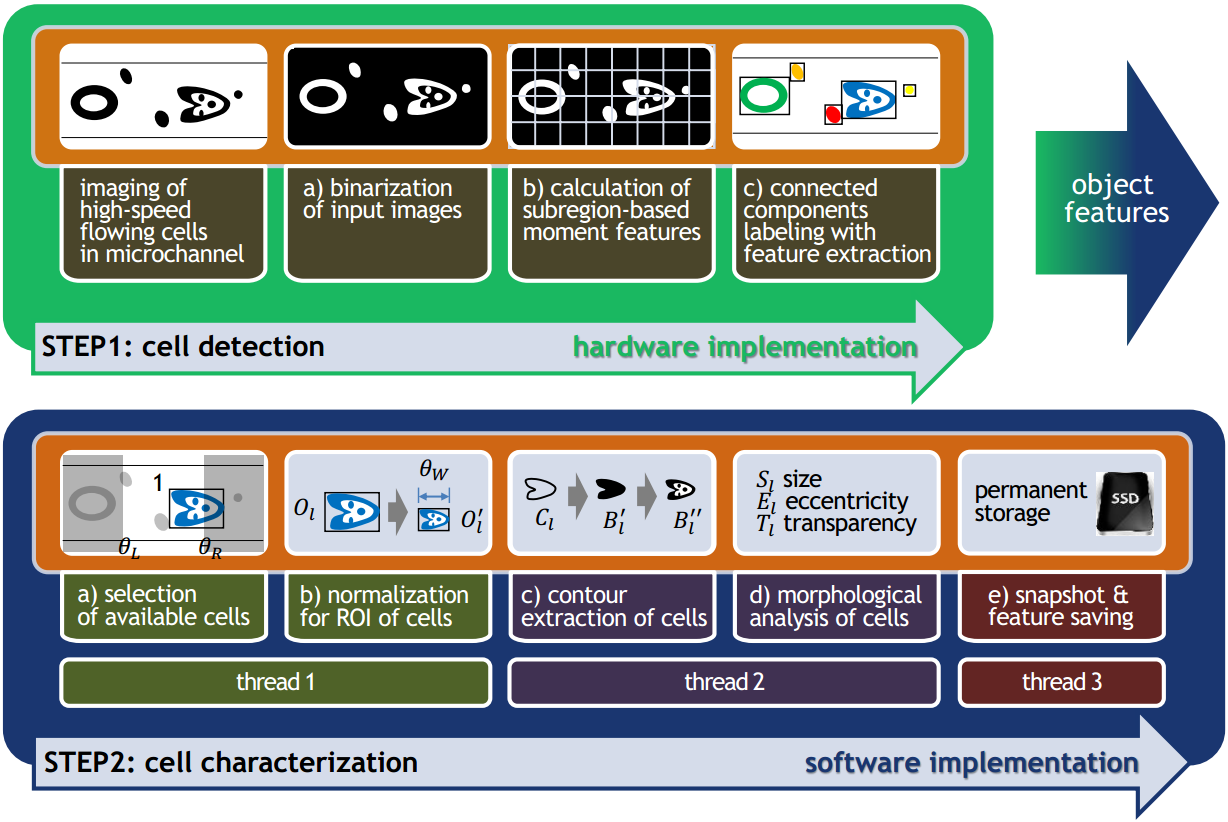 |
Fig. 2: Flow chart of the implemented algorithms. |
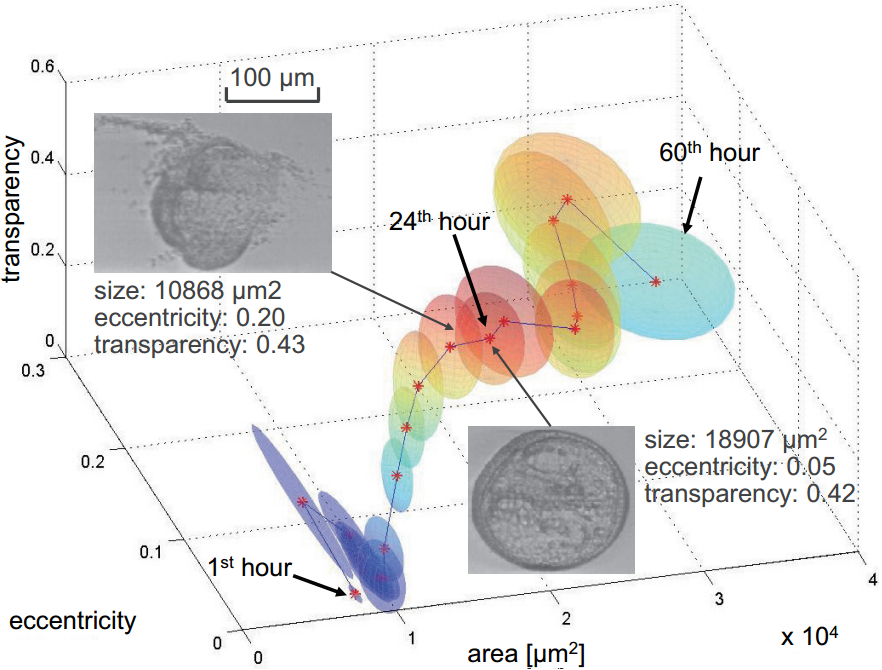 |
Fig. 3: 3D development path of sea urchin embryo from 1 to 60 h after fertilization. |
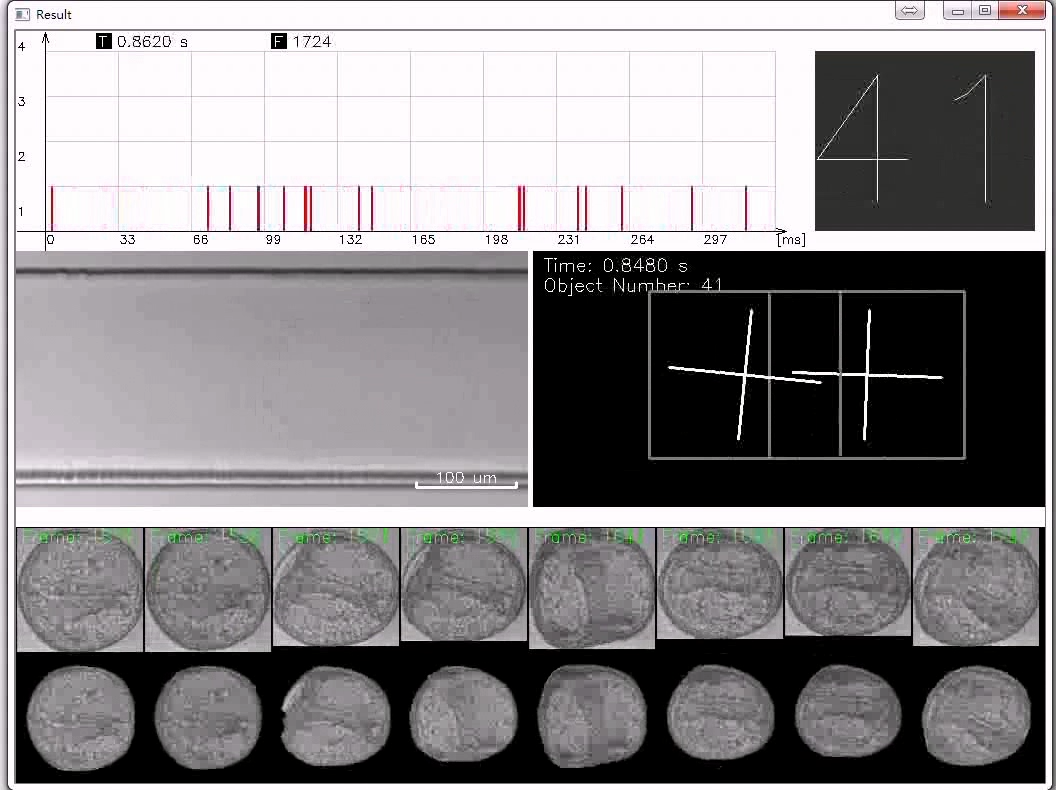 |
| WMV movie (13.5M) Demo video for LOC-based morphological cell analysis system |
Reference
- Qingyi Gu, Tomohiro Kawahara, Tadayoshi Aoyama, Takeshi Takaki, Idaku Ishii, Ayumi Takemoto, and Naoaki Sakamoto, LOC-Based High-Throughput Cell Morphology Analysis System, IEEE Transactions on Automation Science and Engineering, doi: 10.1109/TASE.2015.2462118 (2015) (early access) .
- Qingyi Gu, Tadayoshi Aoyama, Takeshi Takaki, Idaku Ishii, Ayumi Takemoto, Naoaki Sakamoto: Real-Time LOC-Based Morphological Cell Analysis System Using High-Speed Vision, 2014 IEEE/RSJ Int. Conference on Intelligent Robots and Systems, pp.822-827, 2014.