RESEARCHES
Smart Vision & Robotic Sensing

Professor, Robotics Laboratory
Smart Innovation Program, Graduate School of Advanced Science and Engineering
Hiroshima University
Smart Innovation Program, Graduate School of Advanced Science and Engineering
Hiroshima University
Idaku ISHII
- >> Research Contents
- In order to establish high-speed robot senses that are much faster than human senses, we are conducting research and development of information systems and devices that can achieve real-time image processing at 1000 frames/s or greater. As well as integrated algorithms to accelerate sensor information processing, we are also studying new sensing methodologies based on vibration and flow dynamics; they are too fast for humans to sense.
Real-Time Target Tracking for Vibrating Objects
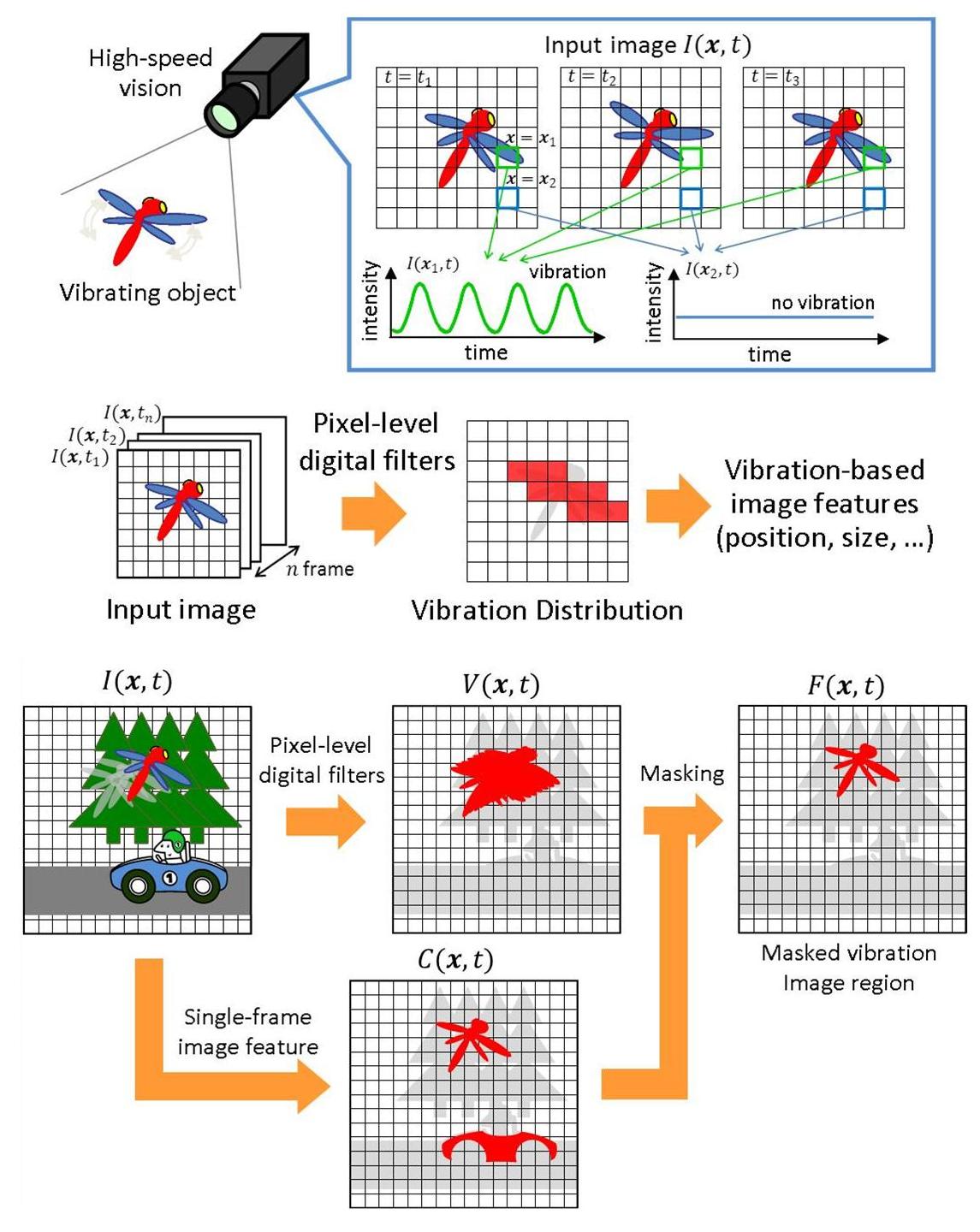
In this study, we propose a concept for the realtime target tracking of vibrating objects to extract vibration image regions using digital filters at all the pixels in an image, assuming that periodic changes in image intensities exist at pixels around vibrating objects. By combining vibration-based processing with color extraction as a masking process, our algorithm can prevent the latency effect on a digital filter, which may degrade its tracking performance. Digital filters at a pixel level are implemented on a 1000-fps vision system that can measure vibration distribution over a wide range of frequencies.
On our target tracking system, we can track a vibrating object at the center of the camera view by controlling a 2-DOF (Degree Of Freedom) active vision system with vibration-based image features. We have verified its effectiveness by presenting several experimental results using objects vibrating at high frequencies, which cannot be observed with the naked eye.
 |
WMV movie(1.7M) Fan Tracking |