研究内容RESEARCHES
Smart Vision & Robotic Sensing
高速ビジョン・ロボットセンシング

- >> 研究テーマ
- 1秒間に1000コマ以上の実時間画像処理を実現する高速ビジョン技術を始めとして、人間の感覚能力を遥かに上回る実時間センシング技術の確立を目指した情報システム/デバイスの研究開発を行うとともに、高速化・集積化を念頭においたアルゴリズムの研究、さらには人間には感じとることが難しい振動ダイナミクス等の情報を積極的利用した新たなセンシング技術の実現を目指します。
高速視覚を用いたアクティブ制震
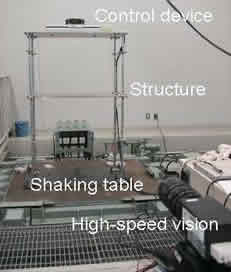
制震は地震や強風による構造物の揺れを制御機構により低減させる技術であり、 構造物に動力を与えて積極的に揺れを低減させるアクティブ制震と、制震部材や制震構造などを利用して動力無しで揺れを低減させるパッシブ制震の二方式がある。 アクティブ制震は、応答性の点で優れており今後の発展が期待されている技術である。 本研究では、地震により引き起こされる構造物の振動を効果的に抑制する手法として、高速視覚を用いた変位計測に基づくアクティブ制震法を提案した。 アクティブ制震において、構造物のロバストな振動抑制を実現するためには、その変形を高速実時間で高精度で測定する必要がある。 しかし、従来用いられたセンサでは変位を高速かつ高精度に取得することが困難であった。 そこで、高速視覚を用いて構造物の全体の変位を計測する手法を提案し、ロバストな制震を実現する。
下記の2つの映像において、制震した場合と制震しなかった場合を比較している。 同じ条件で加振しているにも関わらず、制震により揺れを劇的に抑えていることが確認できる。
 |
アクティブ制震なし MPEG動画(4.6M) 再生 |
|
アクティブ制震あり MPEG動画(2.9M) 再生 |
参考文献
- 中村秀治, 辻徳生, 石井抱, 佐竹亮一, 中山健, 本山潤一郎 : 高速ビジョンを活用した構造物のアクティブ制振技術に関する検討, 土木学会論文集A, Vol.64, No.2, pp.542-555 (2008)
- Junichiro Motoyama, Takeshi Nakayama, Hideharu Nakamura, Tokuo Tsuji and Idaku Ishii: Numerical and Experimental Studies on Active Control of Structures Using Hyper Vision Technology, Proc. 4th Int. Structural Eng. and Construction Conf., pp. 269-274, 2007.