研究内容RESEARCHES
Smart Vision & Robotic Sensing
高速ビジョン・ロボットセンシング

- >> 研究テーマ
- 1秒間に1000コマ以上の実時間画像処理を実現する高速ビジョン技術を始めとして、人間の感覚能力を遥かに上回る実時間センシング技術の確立を目指した情報システム/デバイスの研究開発を行うとともに、高速化・集積化を念頭においたアルゴリズムの研究、さらには人間には感じとることが難しい振動ダイナミクス等の情報を積極的利用した新たなセンシング技術の実現を目指します。
実時間モードパラメータ推定を用いたダイナミクスベースド画像検査法
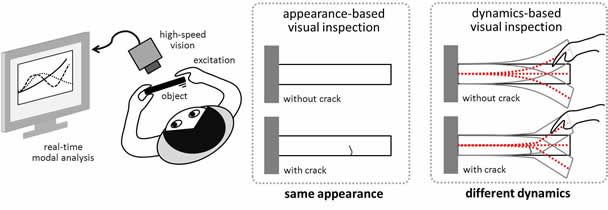
本研究では、高速ビデオ画像に対して、 1枚の画像のみの外観検査では捉えられないモード特性等の動的特性を、対象認識のための画像特徴量として積極的に用いるダイナミクスベースド画像検査法の概念を提案した。
ダイナミクスベースド画像検査法は、対象がアクティブに振動させて初めて観測できるモード特性等の動的特性を高速ビデオ画像から瞬時に推定し、入力不変特徴量として頑強な構造認識を実現するものであり、単一画像を用いたアピアランスベースド画像検査法とは異なる画像検査法といえる。 モード特性は入力不変な特徴であり、異なる振動入力が与えられても、振動した対象の構造は同一の条件で認識できるため、静的な外観が類似する場合も、動的特性の違いを検出することにより微小欠陥 が検出可能となる。
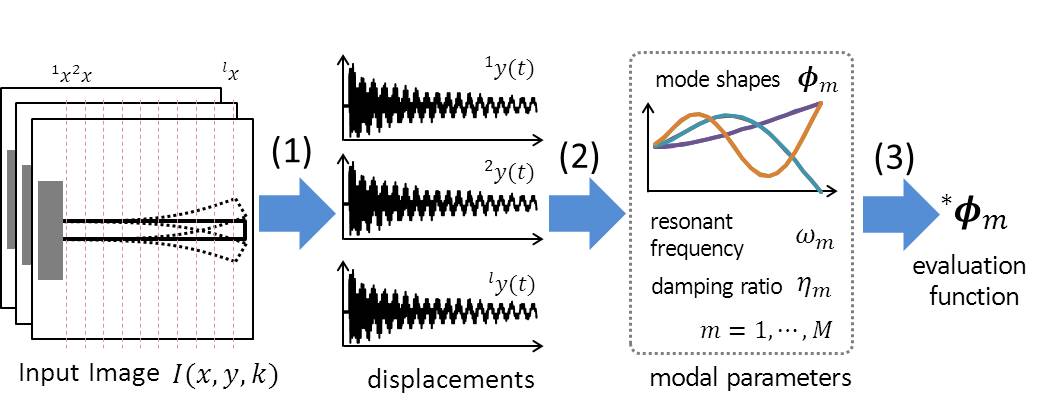
この概念を振動励起入力が未知な場合でも瞬時実現するために、出力データのみからモード特性を推定可能とする、高速モード解析アルゴリズムSSI-CPASTを導入し、2000fpsで動作する高速ビジョンプラットフォーム上に実装した。 実際に、人間の指により加振されたクラックのある片持ち梁に対し、実時間モード解析実験を行い、構築したダイナミクスベースド画像検査システムの有効性を示した。 実験動画を以下に示す。
ダイナミクスベースド画像検査法は、対象がアクティブに振動させて初めて観測できるモード特性等の動的特性を高速ビデオ画像から瞬時に推定し、入力不変特徴量として頑強な構造認識を実現するものであり、単一画像を用いたアピアランスベースド画像検査法とは異なる画像検査法といえる。 モード特性は入力不変な特徴であり、異なる振動入力が与えられても、振動した対象の構造は同一の条件で認識できるため、静的な外観が類似する場合も、動的特性の違いを検出することにより微小欠陥 が検出可能となる。
この概念を振動励起入力が未知な場合でも瞬時実現するために、出力データのみからモード特性を推定可能とする、高速モード解析アルゴリズムSSI-CPASTを導入し、2000fpsで動作する高速ビジョンプラットフォーム上に実装した。 実際に、人間の指により加振されたクラックのある片持ち梁に対し、実時間モード解析実験を行い、構築したダイナミクスベースド画像検査システムの有効性を示した。 実験動画を以下に示す。
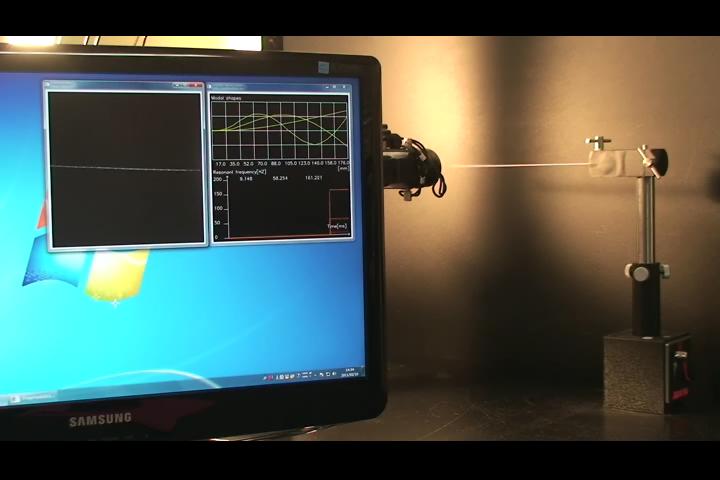 |
MPG movie(2.6M) 実験風景 |
 |
MPG movie(2.8M) 実験結果 |
参考文献
- Hua Yang, Idaku Ishii, and Takeshi Takaki : Real-Time Vision-Based Modal Parameters Estimation at 10000 fps, Proc. SPIE 8345 (SPIE Smart Structures / Sensors and Smart Structure Technologies for Civil, Mechanical, and Aerospace Systems), 83454F, 2012.
- Hua Yang, Takeshi Takaki, and Idaku Ishii : A Structural Damage Quantification Method for HFR-Video-Based Modal Testing, Journal of System Design and Dynamics, Vol.5, No.4, pp.624-641 (2011)
- Hua Yang, Takeshi Takaki, and Idaku Ishii: Simultaneous Dynamics-Based Visual Inspection Using Modal Parameter Estimation, Journal of Robotics and Mechatronics, Vol.23, No.1, pp.180-195 (2011)
- Hua Yang, Takeshi Takaki, and Idaku Ishii: Dynamics-Based Visual Inspection through Real-Time Modal Analysis, Proc. IEEE Int. Conf. on Robotics and Automation, pp.5979-5984, 2011.