研究内容RESEARCHES
Smart Vision & Robotic Sensing
高速ビジョン・ロボットセンシング

- >> 研究テーマ
- 1秒間に1000コマ以上の実時間画像処理を実現する高速ビジョン技術を始めとして、人間の感覚能力を遥かに上回る実時間センシング技術の確立を目指した情報システム/デバイスの研究開発を行うとともに、高速化・集積化を念頭においたアルゴリズムの研究、さらには人間には感じとることが難しい振動ダイナミクス等の情報を積極的利用した新たなセンシング技術の実現を目指します。
高速ビジョンを用いたマルチコプター追跡
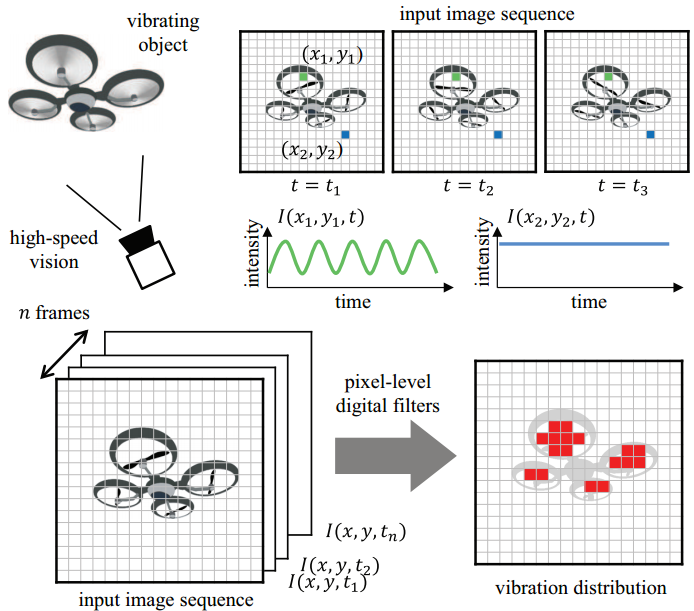
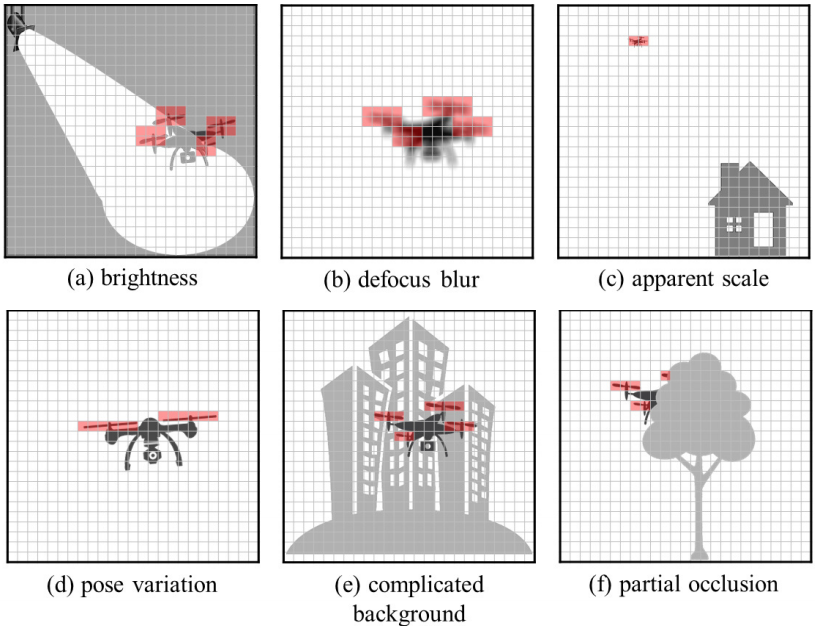
本研究では,マルチコプターの実時間検出・追跡に向けた高速ビジョンに基づく監視法を提案した.提案手法は,ピクセルレベルのバンドパスフィルタを用いることで,音声周波数レベル(数百Hz)で振動するマルチコプターの回転プロペラ周辺での周期的な輝度変化を検出し,画像処理ベースで振動源を定位する手法である.従来のアピアランスベースド画像認識による対象追跡とは異なり,提案手法は輝度や焦点ボケ,見かけの大きさ,姿勢変化,背景,オクルージョン,動きボケ等の様々なアピアランスの変化に対してロバストであり,実環境に対してロバストな手法である.
対象であるマルチコプターを追跡する1000コマ/秒の視覚フィードバックが可能な2自由度アクティブビジョンシステム上の高速ビジョンプラットフォームに提案手法を実装し,実時間マルチコプタートラッキング実験を行い,その有効性を検証した.
対象であるマルチコプターを追跡する1000コマ/秒の視覚フィードバックが可能な2自由度アクティブビジョンシステム上の高速ビジョンプラットフォームに提案手法を実装し,実時間マルチコプタートラッキング実験を行い,その有効性を検証した.
 |
 |
| AVI movie(14.7M) Multicopter tracking demo |
参考文献
- Mingjun Jiang, Tadayoshi Aoyama, Takeshi Takaki, and Idaku Ishii: Pixel-Level and Robust Vibration Source Sensing in High-Frame-Rate Video Analysis, Sensors, Vol.16, No.11, 1842 (2016)
- Mingjun Jiang, Tadayoshi Aoyama, Takeshi Takaki, and Idaku Ishii: Vibration Source Localization for Motion-blurred High-frame-rate Videos, Proc. IEEE Int. Conf. on Robotics and Biomimetics, pp.774-779, 2016.