研究内容RESEARCHES
Smart Vision & Robotic Sensing
高速ビジョン・ロボットセンシング

- >> 研究テーマ
- 1秒間に1000コマ以上の実時間画像処理を実現する高速ビジョン技術を始めとして、人間の感覚能力を遥かに上回る実時間センシング技術の確立を目指した情報システム/デバイスの研究開発を行うとともに、高速化・集積化を念頭においたアルゴリズムの研究、さらには人間には感じとることが難しい振動ダイナミクス等の情報を積極的利用した新たなセンシング技術の実現を目指します。
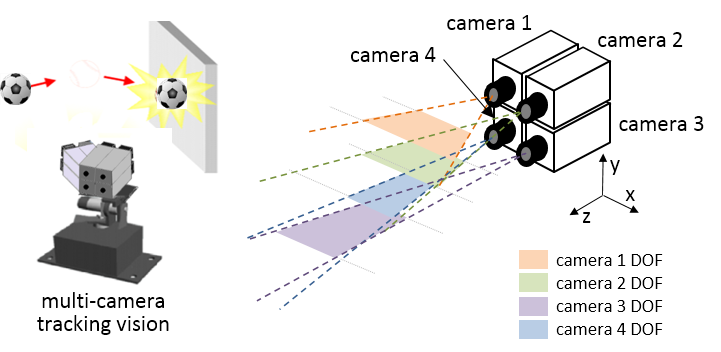
異なるレンズ系を持つ高速マルチカメラトラッキングシステム
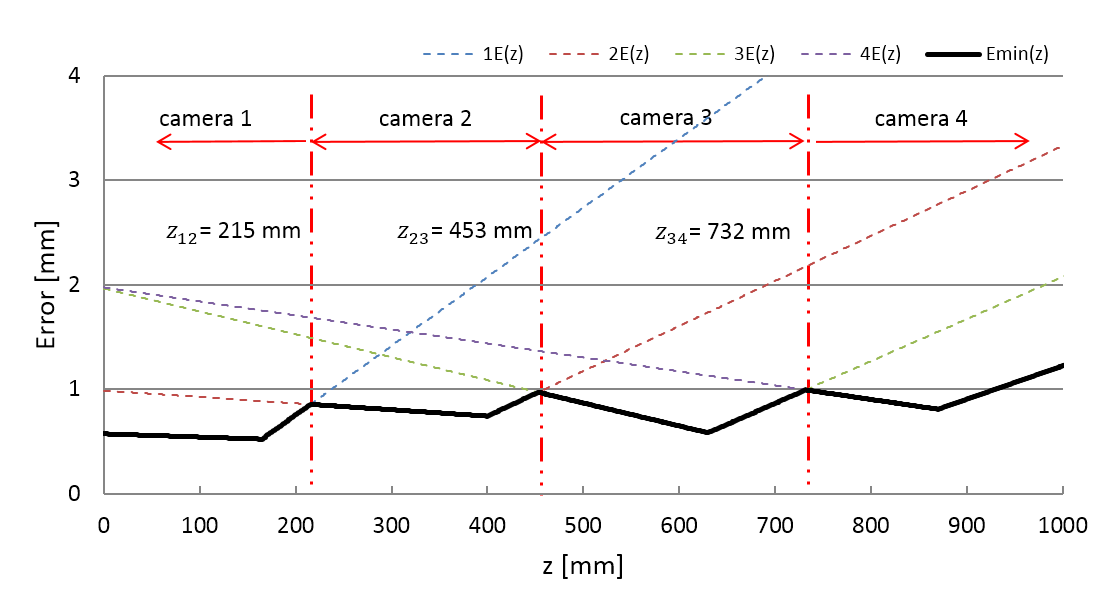
本研究では、3次元空間内でカメラに対する奥行き方向に対象物が運動する場合においても、焦点ぼけなく対象を追跡するための異なる焦点距離のレンズを装着させた4眼カメラヘッドを使用した高速対象追跡システムを開発する。
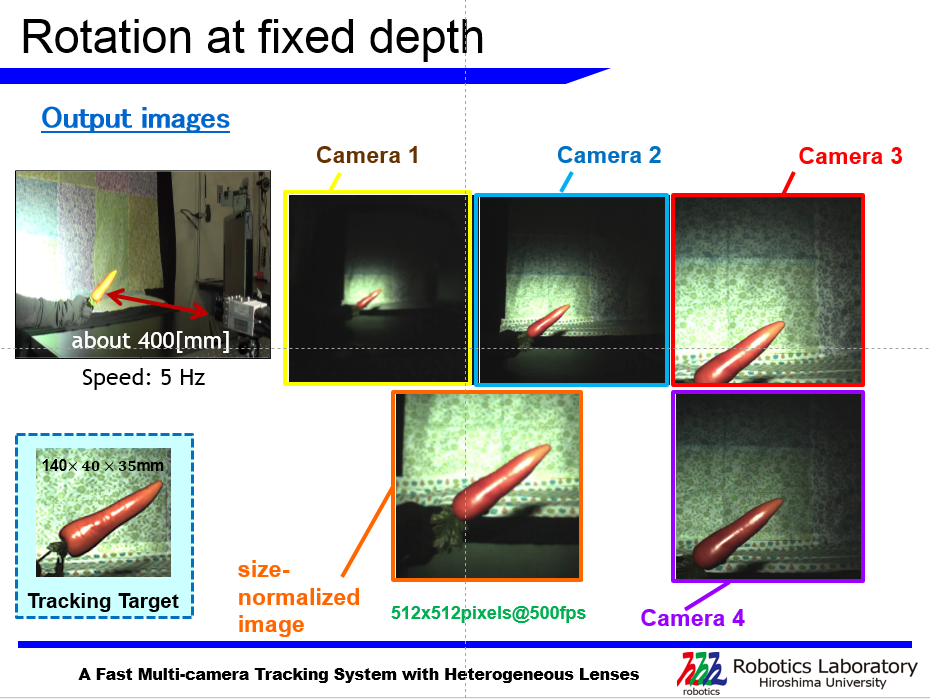
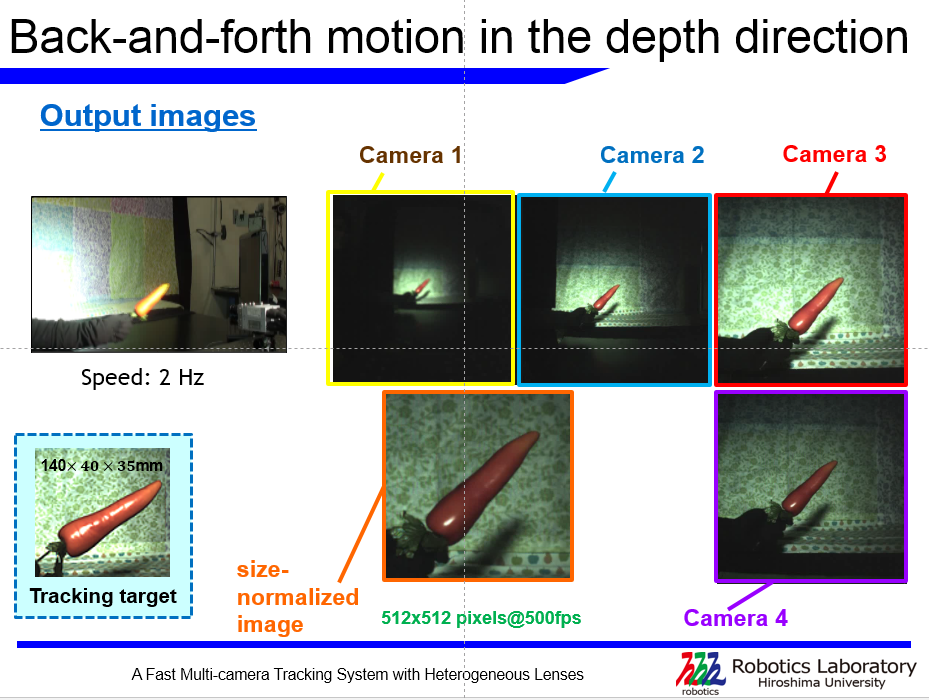
本システムは、アクチュエータによるフォーカス調整の代わりに、4つの入力画像を切り替えることで、適切な焦点距離のカメラを維持することが可能であり、複数のカメラシステムは、2自由度のアクティブビジョンプラットフォームへ搭載されている。 高速ビジョンプラットフォーム上から500fpsで実時間に取得される4つのカメラ入力から512×512画素のカラー画像処理を行うことで、アクティブビジョン制御及びカメラ切り替えが行われる。 3次元空間上で高速に運動する対象物のトラッキング実験を通じて、提案システムを検証した。
本システムは、アクチュエータによるフォーカス調整の代わりに、4つの入力画像を切り替えることで、適切な焦点距離のカメラを維持することが可能であり、複数のカメラシステムは、2自由度のアクティブビジョンプラットフォームへ搭載されている。 高速ビジョンプラットフォーム上から500fpsで実時間に取得される4つのカメラ入力から512×512画素のカラー画像処理を行うことで、アクティブビジョン制御及びカメラ切り替えが行われる。 3次元空間上で高速に運動する対象物のトラッキング実験を通じて、提案システムを検証した。
 |
 |
 |
WMV movie(1.3M) object tracking with multi-camera |
 |
WMV movie(0.9M) object tracking with multi-camera |