研究内容RESEARCHES
Smart Vision & Robotic Sensing
高速ビジョン・ロボットセンシング

- >> 研究テーマ
- 1秒間に1000コマ以上の実時間画像処理を実現する高速ビジョン技術を始めとして、人間の感覚能力を遥かに上回る実時間センシング技術の確立を目指した情報システム/デバイスの研究開発を行うとともに、高速化・集積化を念頭においたアルゴリズムの研究、さらには人間には感じとることが難しい振動ダイナミクス等の情報を積極的利用した新たなセンシング技術の実現を目指します。
競走馬の歩様解析
毎年およそ1200 頭の競走馬が屈腱炎を発症しており、
屈腱炎を含めた疾病の一般的な症状の一つに歩行障害(跛行)があるため、跛行の有無が疾病の臨床診断では重要な要素となる。
現在の跛行診断は、獣医の目視による観察を行っているため、評価が主観的である上、
軽度の症状では熟練した臨床医でさえ発見するのが困難である。
本研究では、跛行定量化システムの実現のため、高速視覚を用いて疾病を患ったウマの走行フォームを解析する。
本研究では前肢支柱跛行、後肢支柱跛行の2種類について取り扱った。
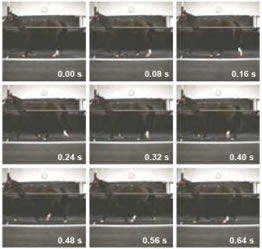
JRA 競走馬総合研究所(宇都宮市)で走行フォームのサンプリングを実施した。供試馬の左前肢、左後肢、右前肢、右後肢の蹄部にそれぞれ蛍光マーカーを貼付し、頭部に蛍光マーカー、 き甲部、十字部にそれぞれ発泡スチロールマーカーを貼付した。 なお本実験では、2本のネジを左前肢または左後肢の蹄鉄に固定し、 ネジ先で蹄底に疼痛を惹起させて前肢支柱跛行および後肢支柱跛行を疑似し、軽度から重度まで4段階の疼痛状態を実現した。 ウマはトレッドミル上を速歩走行させ、高速視覚を用いた左下図のように左半身を撮影し、各部位のマーカーをトラッキングした。 本研究では目視による跛行診断も併せて行った。
従来方法では診断不可能な疼痛状態において、 前肢跛行について、高速視覚による解析で変化が見られるパラメータについて検証したところ、(1) 左前肢の離地地点と左後肢の接地地点の水平方向の距離が短くなる、(2) 左前肢が離地するときの加速度平均で、水平と垂直の両方向で大きさが減少する傾向が見られた。これらの結果より、従来方法では診断不可能な疼痛状態では、 離地するときの加速度を小さくし、症状が重くなると、 さらに点頭運動を行うことによって、 患肢への負担を軽減していると考えられる。
後肢跛行の場合でも、従来方法では診断不可能な疼痛状態において、 高速視覚による解析で変化が見られるパラメータについて検討したところ、 (1) 四肢と馬体の位置関係において各肢の離地地点が後退する(右下図)、(2) 頭部とき甲部の水平方向の距離で、 接地と離地の両方で距離が大きくなり、 頭部の位置が前方に移動する傾向が見られた。 これらの結果より、従来方法では診断不可能な軽度の疼痛状態では、 四肢に対して馬体および頭部を前方に移動させることで 患肢で支える体重を軽減し、負担を軽くしていると考えられる。前肢跛行の場合では、重度の疼痛状態のみで患肢で支える体重を軽減していることを考えると、 前肢跛行と後肢跛行で跛行のメカニズムが異なることがわかった。

JRA 競走馬総合研究所(宇都宮市)で走行フォームのサンプリングを実施した。供試馬の左前肢、左後肢、右前肢、右後肢の蹄部にそれぞれ蛍光マーカーを貼付し、頭部に蛍光マーカー、 き甲部、十字部にそれぞれ発泡スチロールマーカーを貼付した。 なお本実験では、2本のネジを左前肢または左後肢の蹄鉄に固定し、 ネジ先で蹄底に疼痛を惹起させて前肢支柱跛行および後肢支柱跛行を疑似し、軽度から重度まで4段階の疼痛状態を実現した。 ウマはトレッドミル上を速歩走行させ、高速視覚を用いた左下図のように左半身を撮影し、各部位のマーカーをトラッキングした。 本研究では目視による跛行診断も併せて行った。
従来方法では診断不可能な疼痛状態において、 前肢跛行について、高速視覚による解析で変化が見られるパラメータについて検証したところ、(1) 左前肢の離地地点と左後肢の接地地点の水平方向の距離が短くなる、(2) 左前肢が離地するときの加速度平均で、水平と垂直の両方向で大きさが減少する傾向が見られた。これらの結果より、従来方法では診断不可能な疼痛状態では、 離地するときの加速度を小さくし、症状が重くなると、 さらに点頭運動を行うことによって、 患肢への負担を軽減していると考えられる。
後肢跛行の場合でも、従来方法では診断不可能な疼痛状態において、 高速視覚による解析で変化が見られるパラメータについて検討したところ、 (1) 四肢と馬体の位置関係において各肢の離地地点が後退する(右下図)、(2) 頭部とき甲部の水平方向の距離で、 接地と離地の両方で距離が大きくなり、 頭部の位置が前方に移動する傾向が見られた。 これらの結果より、従来方法では診断不可能な軽度の疼痛状態では、 四肢に対して馬体および頭部を前方に移動させることで 患肢で支える体重を軽減し、負担を軽くしていると考えられる。前肢跛行の場合では、重度の疼痛状態のみで患肢で支える体重を軽減していることを考えると、 前肢跛行と後肢跛行で跛行のメカニズムが異なることがわかった。