研究内容RESEARCHES
Smart Mechanics Design & Manipulation
ロボットメカニズム & マニピュレーション

- >> 研究テーマ
- リアルワールドに対する迅速かつ柔軟な行動を実現する基盤ロボティクス技術として、高速ビジョンを用いたセンサベースドマニピュレーションの研究、構造に知能を内包したロボットメカニズムの研究などを行っており、人間とは異なる形でのマニピュレーション技術の実現を目指しています。
視点変換アイリスによる単眼ステレオビジョン
複数カメラを用いた三次元ステレオ計測は多くの研究が行われており、様々な場面で応用されている。
一方で、異なる時刻で得られる画像を用いた単眼ステレオ計測では、
高速に視点を動かす機構が導入されておらず計測対象は静止物などに限定されていた。
本研究では、運動対象に対する単眼ステレオ計測を行うためレンズの絞り機構であるアイリスに着目し、
秒間1000回以上で視点切替可能な視点変換アイリスを提案する。
また、その動作検証を行う。
提案する視点変換アイリスについて、その原理と機構、特徴に分けて以下に説明する。
 (1) 視点変換アイリスの原理
(1) 視点変換アイリスの原理
(2) 視点変換アイリスの機構
(3) 視点変換アイリスの特徴
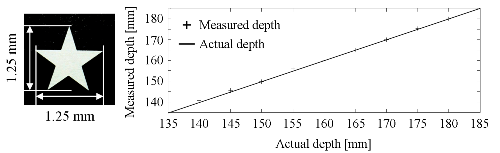
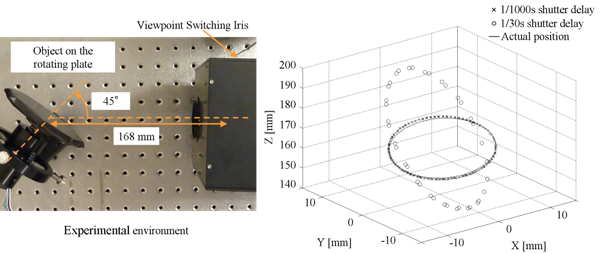
下図は静止対象の奥行き計測の計測対象および実験結果である。 また同様の計測対象を回転させ、従来の30fpsのシステムとの比較実験も行った。 さらに、視点変換アイリスと高速ビジョンプラットフォームH3Visionを組み合わせることにより、特徴点の三次元計測について実時間での動作を確認した。 以下の動画は視点変換アイリスの原理、機構、および複雑な対象の計測結果を紹介したものである。
提案する視点変換アイリスについて、その原理と機構、特徴に分けて以下に説明する。
(1) 視点変換アイリスの原理
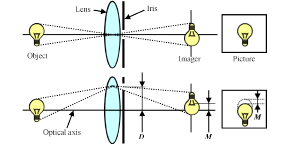
一般的なレンズユニットではアイリス孔は光軸の中心にあり、撮像対象が光軸上の場合は画像中心に表示される。このときアイリス孔の位置が光軸からずれると、それに依存して撮影対象も画像中心からずれる。このずれが視点の違いとして検出される。
(2) 視点変換アイリスの機構
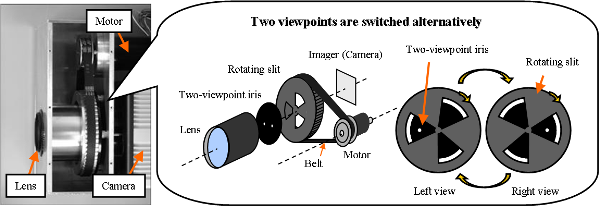
視点変換アイリスは2つの固定されたピンホール孔を持つアイリスといくつかのスリットが開いている回転スリットから構成されている。 この回転スリットが少し回転することで2つのピンホール孔が交互に切り替わり、自動的に視点を変換する仕組みとなっている。 このときの回転スリットの回転数はカメラのフレームレートによって調整し、1フレームごとに視点が切り替わるように設定する。
(3) 視点変換アイリスの特徴
視点変換アイリスは光量が絞られ画像が暗くなるという問題がある一方で、 スリットによる切替であるためモーションブレが発生せず、 アイリス孔の微小移動により瞬間的に視点を大きく動かすことができるため、 高速な視点切替に向いている。
下図は静止対象の奥行き計測の計測対象および実験結果である。 また同様の計測対象を回転させ、従来の30fpsのシステムとの比較実験も行った。 さらに、視点変換アイリスと高速ビジョンプラットフォームH3Visionを組み合わせることにより、特徴点の三次元計測について実時間での動作を確認した。 以下の動画は視点変換アイリスの原理、機構、および複雑な対象の計測結果を紹介したものである。
 |
MPEG動画(4.7M) 視点変換アイリスの原理および実験 |
参考文献
- 森上雄太, 中山裕太, 高木健, 石井抱, 4ピンホール視点変換アイリスを用いた単眼ステレオ計測, 日本機械学会論文集, Vol.80, No.819, p.DR0322 (2014)
- 森上雄太, 高木健, 石井抱 : 視点変換アイリス機構に基づく単眼ステレオシステム, 日本機械学会論文集(C編), Vol.76, No.770, pp.2584-2591 (2010)
- Yuta Moriue, Takeshi Takaki, Kenkichi Yamamoto, and Idaku Ishii: Monocular Stereo Image Processing Using the Viewpoint Switching Iris : Proc. IEEE Int. Conf. on Robotics and Automation, pp.2804-2809, 2009.