研究内容RESEARCHES
Smart Mechanics Design & Manipulation
ロボットメカニズム & マニピュレーション

- >> 研究テーマ
- リアルワールドに対する迅速かつ柔軟な行動を実現する基盤ロボティクス技術として、高速ビジョンを用いたセンサベースドマニピュレーションの研究、構造に知能を内包したロボットメカニズムの研究などを行っており、人間とは異なる形でのマニピュレーション技術の実現を目指しています。
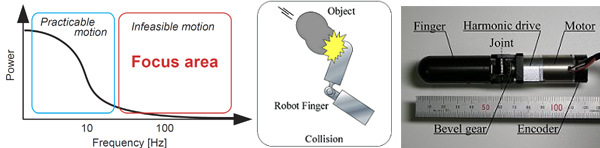
周波数情報に着目した衝突検出法とそのロボット指への適用
一般にロボットハンドの駆動用モータの制御において、実用的に利用できる周波数帯は高くても数十ヘルツ程度で、それよりも高い周波数帯は使用していない。
そこでこの高周波数帯に着目し、この領域をロボットハンドの制御以外の有益な周波数情報として利用することを考える。
本研究ではロボット指を用い、モータの駆動には現れない高周波数成分として衝突をとりあげ、衝突の検出方法を提案する。
衝突に現れる周波数帯をフィルタリングすることにより抽出し、衝突が検出できることを実験的に確認した。

|
MPEG動画(5.9 M) 衝突検出(1 Hz) |

|
MPEG動画(2.6 M) 衝突検出(20 Hz) |