研究内容RESEARCHES
Smart Mechanics Design & Manipulation
ロボットメカニズム & マニピュレーション

- >> 研究テーマ
- リアルワールドに対する迅速かつ柔軟な行動を実現する基盤ロボティクス技術として、高速ビジョンを用いたセンサベースドマニピュレーションの研究、構造に知能を内包したロボットメカニズムの研究などを行っており、人間とは異なる形でのマニピュレーション技術の実現を目指しています。
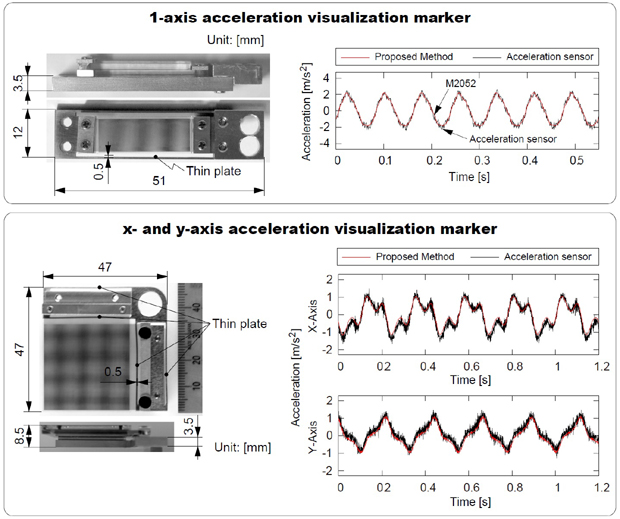
モアレ縞を用いた加速度可視化マーカ
工場,橋,ビルなどの大きな建造物の健全性を維持するために,それらの構造物に生じている加速度を計測することが求められている.
この要求を満たすために,アンプ,ひずみゲージ,配線などの電気的な要素を一切用いることなく加速度の大きさに応じた縞模様を表示できるマーカを開発した.
弾性要素に加速度が生じると,慣性力により弾性要素は変形する.
多くの加速度センサは,この変形により生じる微小変位を計測することで加速度を算出している.
我々もこの微小変位に着目した.
提案するマーカはこの変位をモアレ縞を用いて視覚的に拡大表示するものである.
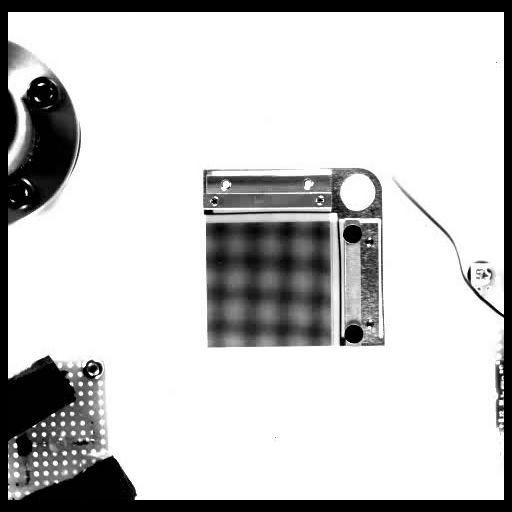
マーカの構造はシンプルであり,弾性板と格子模様が印刷されている2枚のガラス板から構成されている.
画像処理をすることで加速度の正確な値を得ることができる.
 |

|
MPG動画(5.2 M) 1軸の加速度可視化マーカ |
|
MPG動画(8.5 M) xy軸の加速度可視化マーカ |