研究内容RESEARCHES
Smart Mechanics Design & Manipulation
ロボットメカニズム & マニピュレーション

- >> 研究テーマ
- リアルワールドに対する迅速かつ柔軟な行動を実現する基盤ロボティクス技術として、高速ビジョンを用いたセンサベースドマニピュレーションの研究、構造に知能を内包したロボットメカニズムの研究などを行っており、人間とは異なる形でのマニピュレーション技術の実現を目指しています。
空気噴流を用いた非接触マニピュレーション
一般的なマニピュレーションは、マニピュレータが対象に接触することにて実現されている。
このような技術は古くから実用化されており、生産現場などで多く用いられ、工業の発展に大きく貢献してきた。
一方でマニピュレーション技術の向上を目指し、固体同士が接触することなくマニピュレーションを実現する技術も報告されており、電磁力や音波などを用いる方法がある。
固体同士が接触しなければ、衝突や磨耗などの問題が緩和され、より多くの対象をロボットによりマニピュレーションできるようになると考えられる。
本研究では比較的容易に扱えて大きな力も出力できる空気噴流に着目し、平面上にある対象を複数の空気噴流を用いて任意の位置に移動させる方法を提案する。
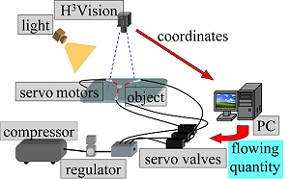
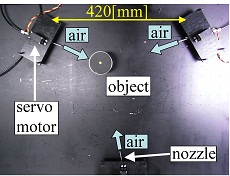
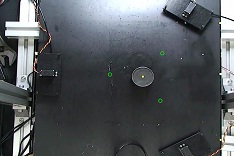
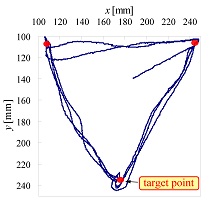
実験システムおよび対象を目標位置に制御する実験の動画とその実験結果を下図に示す。 対象の位置を高速ビジョンにより計測し、その値より空気の流量、ノズルの向きを決定し対象を制御している。 実験結果のグラフにおいて赤い点は目標位置、青線は対象が移動した軌跡を示している。 対象を目標位置に移動させることができていることが分かる。
実験システムおよび対象を目標位置に制御する実験の動画とその実験結果を下図に示す。 対象の位置を高速ビジョンにより計測し、その値より空気の流量、ノズルの向きを決定し対象を制御している。 実験結果のグラフにおいて赤い点は目標位置、青線は対象が移動した軌跡を示している。 対象を目標位置に移動させることができていることが分かる。
 |
 |
|
WMV動画(1.1 M) |
 |